Современное состояние автомобильной электроники
Управление ходовой частью
Управление ходовой частью подразумевает управление процессами движения, изменение траектории при поворотах и торможении автомобиля. Электронные системы управления ходовой частью улучшают управляемость, устойчивость и комфортабельность автомобиля. Они выполняют управление подвеской, колесами, тормозами, поддержание заданной скорости движения и т.п. Управление подвеской обеспечивает ее оптимальную работу при различных скоростях и загрузке автомобиля. Электронные системы управляют высотой кузова относительно дороги, другими элементами и степенью демпфирования амортизаторов.
Управление высотой кузова относительно дороги обеспечивает постоянство этого параметра независимо от загрузки автомобиля. Уменьшение высоты кузова при движении с большой скоростью приводит к снижению аэродинамических потерь и повышению устойчивости автомобиля на дороге. Использование электронной системы управления автоматически обеспечивает оптимальную высоту кузова над дорогой. Сигналы от датчиков высоты кузова и скорости поступают на вход электронного блока управления, выходной сигнал которого подается в исполнительный механизм, который чаще всего представляет собой диафрагму, перемещаемую под действием сжатого воздуха, подаваемого насосом. Управление другими элементами подвески и степенью демпфирования амортизаторами повышает устойчивость автомобиля и препятствует изменениям положения кузова при резких поворотах, ускорениях и торможении.
Следует отметить, что для повышения комфортабельности подвеска должна быть мягкой, но, с другой стороны, для лучшей устойчивости она, напротив, должна быть достаточно жесткой. Поэтому электронный блок управления, на основе сигналов от датчика скорости, угла поворота рулевого колеса, угла открытия дроссельной заслонки, а также от концевого переключателя педали тормоза, воздействует на исполнительные устройства, которые изменяют параметры упругих элементов подвески и амортизаторов каждого из колес. Чаще всего это осуществляется с помощью электромагнитных клапанов или малогабаритных электродвигателей, которые изменяют сечение отверстий в пневматических упругих элементах, изменяя тем самым их упругость, или в гидравлических усилителях, варьируя их демпфирование.
Электронный блок управления регулирует усилие на рулевом колесе (при наличии гидроусилителя) или поворот четырех колес и т.п. Управление усилием на рулевом колесе сводится к его уменьшению, когда автомобиль стоит или движется с малой скоростью и, наоборот, к его увеличению при 10 больших скоростях, что обеспечивает курсовую устойчивость и управляемость. Можно также изменять усилие на руле по желанию водителя. Система управления тормозами, главным образом, предотвращает блокирование колес при торможении, тем самым обеспечивая повышение устойчивости автомобиля при торможении.
Такая система носит название антиблокировочной. Состояние блокирования колес можно определить, сравнивая поступательную скорость автомобиля и угловую скорость колеса. Но из-за трудности определения скорости автомобиля по причине проскальзывания колес, в качестве базовой обычно используется расчетная средняя скорость колес. На основе сигналов датчика скорости вращения колес электронный блок управления выявляет состояние блокирования какого-либо колеса и посылает сигнал исполнительному устройству, которое снижает давление тормозной жидкости в тормозном цилиндре данного колеса. Как только скорость колеса увеличится, давление тормозной жидкости снова возрастает, и процесс повторяется.
Поскольку при этом предотвращается блокирование и управляемых колес, обеспечивается повышение не только устойчивости к заносам, но и управляемости автомобиля. Еще одним преимуществом системы управления тормозами является наличие устройства, поддерживающего постоянным давление тормозной жидкости при торможении, после остановки (до начала движения), что удобно на уклонах. Система поддержания заданной скорости движения управляет дроссельной заслонкой, обрабатывая сигналы датчика скорости, выключателя и указателя режима, управляет исполнительным устройством, связанным с дроссельной заслонкой. В исполнительных устройствах используется вакуумный привод, малогабаритные электродвигатели и т.д.
Управление оборудованием салона и кузова
Системы управления оборудованием салона и кузова призваны повысить комфортабельность и потребительскую ценность автомобиля. В зависимости от класса автомобиля используются такие устройства с электронным управлением, как кондиционер воздуха, панель приборов, управляемое сиденье водителя, мультифункциональная информационная система на базе электронного дисплея, компас, фары, стеклоочиститель с различными режимами работы, индикатор перегоревших ламп, устройство обнаружения препятствий при движении задним ходом, противоугонные устройства, аппаратура связи, централизованная блокировка замков дверей, стеклоподъемники, ремни и подушки безопасности и т.д. Перечисленные устройства обеспечивают автоматизацию работы водителя, повышая удобство эксплуатации автомобиля, уменьшая трудности 11 управления им. Они используются главным образом в автомобилях высшего класса. 2.
С каждым годом требования к компактности, весу и малому потреблению электроэнергии электронных блоков управления возрастают. Для удовлетворения этих потребностей можно увеличить число слоев в структурах больших интегральных схем (БИС), переводить БИС на КМОП технологию, использовать в качестве выходных управляющих устройств мощные полевые транзисторы и т.п. Объединение в сеть многих блоков управления, установленных в автомобиле, дает возможность для общего использования информации, взаимной диагностики, выполнения функций вышедшего из строя блока управления другим блоком системы. Кроме того, используя для внешней связи радиотелефон, установленный в автомобиле, можно получить на дисплее информацию о дороге, дополнительных услугах и т.д. Анализируется также система воздействия извне на устройства автомобиля. Перестала быть мечтой навигационная система, которая, принимая сигналы искусственного спутника Земли глобальной системы местоопределения, сообщает водителю координаты автомобиля.

На рис. 2.1 показан пример использования системы внешней связи автомобиля при следующих обозначениях: 1 — жилой дом; 2 — охранно-сигнальная система; 3 — домашняя ЭВМ; 4 — кондиционер; 5 — спутник глобальной системы местоопределения; 6 — служба сети; 7 — дорожная информация; 8 — дисплей; 9 — электронный блок управления дисплеем; 10 -электронный блок управления радиотелефона; 11 — электронный блок управления глобальной системы местоопределения; 12 — блок управления навигационной системы; 13 — блок диагностики; 14 — внутренняя сеть автомобиля; 15 — персональная ЭВМ; 16 — служба автоматизированной диагностики.
В последнее время появились сообщения в журналах о том, что внедряется система типа навигационной, позволяющая оптимизировать курс на основе спутниковой системы и CD-rom, на котором записаны карты местности. Спутниковая система позволяет определить место нахождения автомобиля, а затем из памяти вызывается участок карты с названиями улиц, определяется кратчайший путь до точки следования с учетом расположения автозаправочных станций. Кроме таких систем разрабатываются устройства типа автопилота, позволяющие управлять автомобилем без участия водителя на основе сигналов, поступающих из кабельной системы, смонтированной под полотном автострады.
В.П. Федосов В.Д. Сытенький Автомобильная электроника. Учебное пособие
Система электронного управления ходовой частью
Под управлением ходовой частью понимается управление процессами движения, изменения траектории и торможения автомобиля. Электронные системы управления ходовой частью улучшают управляемость, устойчивость и комфортабельность автомобиля. Они выполняют управление подвеской, колесами, тормозами, поддержание заданной скорости движения и т. п.
Управление подвеской обеспечивает ее оптимальную работу при различных скоростях и массе груза и автомобиля. Электронные системы управляют высотой кузова относительно дороги, упругими элементами и демпфированием амортизаторов.
Управление высотой кузова относительно дороги обеспечивает постоянство этого параметра независимо от загрузки автомобиля. Уменьшение высоты кузова при движении с высокой скоростью приводит к снижению аэродинамических потерь и повышению устойчивости автомобиля на дороге. Системы с ручным заданием высоты применялись и ранее на автомобилях «Ситроен» и других. Использование электронной системы управления автоматически обеспечивает оптимальную высоту кузова над дорогой. Сигналы от датчиков высоты кузова и скорости поступают на вход ЭБУ, выходной сигнал из которого подается в исполнительный механизм, который обычно представляет собой диафрагму, перемещающуюся под действием сжатого воздуха, подаваемого насосом.
Управление упругими элементами подвески и демпфированием амортизаторов повышает устойчивость автомобиля и препятствует изменениям положения кузова при резких поворотах, ускорениях и торможениях. С одной стороны, для повышения комфортабельности движения подвеска должна быть мягкой, но, с другой стороны, для лучшей устойчивости она, напротив, должна быть достаточно жесткой. Поэтому ЭБУ, получая на вход сигналы от датчиков скорости угла поворота рулевого колеса, угла открытия дроссельной заслонки, а также от концевого переключателя педали тормоза, управляет исполнительными устройствами, которые соответственно изменяют параметры упругих элементов подвески и амортизаторов каждого из колес. Обычно это осуществляется с помощью электромагнитных клапанов или малогабаритных электродвигателей, которые изменяют сечения отверстий в пневматических упругих элементах, изменяя тем самым их упругость, или в гидравлических амортизаторах, варьируя их демпфирование.
Системы управления подвеской в Японии начали особенно широко применяться в 80-е гг., в США несколько позже и только частью компаний, в Европе же такие системы пока почти не применяются.
ЭБУ в рулевом управлении регулирует усилие на рулевом колесе (при наличии гидроусилителя) или поворот четырех колес и т. п. Управление усилием на рулевом колесе сводится к его уменьшению, когда автомобиль стоит или движется с малой скоростью и, наоборот, к его увеличению при больших скоростях, что обеспечивает курсовую устойчивость и управляемость. Возможно, также изменять усилие на руле по желанию водителя.
Поэтому с начала 80-х гг. автомобильные компании Японии стали применять системы управления, состоящие из ЭБУ, датчиков скорости и угла поворота рулевого колеса, переключателя режимов работы рулевого управления, а также гидроцилиндра с электромагнитным клапаном, используемого в качестве исполнительного устройства.
На рисунке 9.9 показана 
схема такой системы.
1 — индикаторная лампа, управляемая сигналом с датчика скорости; 2 — датчик включения стоп-сигнала; 3 — датчик угла поворота рулевого колеса; 4 — исполнительные устройства амортизаторов передних колес; 5 — датчик угла открытия дроссельной заслонки; 6 — переключатель коробки передач; 7 — переключатель режимов работы подвески; 8 — ЭБУ; 9 — исполнительные устройства амортизаторов задних колес.
Рис. 9.5 Система управления демпфированием амортизаторов
Система управления тормозами главным образом предотвращает блокирование колес при торможении, тем самым обеспечивая повышение устойчивости автомобиля при торможении. Такая система называется антиблокировочной. Состояние блокирования колеса можно определить, сравнивая поступательную скорость автомобиля и угловую скорость колеса. Но так как скорость автомобиля определить весьма трудно из-за проскальзывания колес, вместо нее в качестве базовой обычно используется расчетная средняя скорость колес.
На основании сигналов датчиков скорости вращения колес ЭБУ выявляет состояние блокирования какого-либо колеса и посылает сигнал исполнительному устройству, которое снижает давление тормозной жидкости в тормозном цилиндре данного колеса. Как только скорость колеса увеличится, давление тормозной жидкости снова возрастает и процесс повторяется.
Контроль проскальзывания колес при торможении применяется сравнительно давно. Начиная с автомобилей Форда в 1968 г. эти системы нашли распространение в Японии, США и Европе. Вначале предотвращалось блокирование только двух задних колес автомобиля, но в последние годы в связи с использованием микроЭВМ в основном применяются системы управления тормозами всех четырех колес. При этом, поскольку предотвращается блокирование и передних (управляемых) колес, обеспечивается повышение не только устойчивости к заносам, но и управляемости автомобиля.
Еще одним преимуществом системы управления тормозами является наличие устройства, поддерживающего постоянным давление тормозной жидкости при торможении, после остановки (до начала движения), что удобно на уклонах и т. п.
Система поддержания заданной скорости движения управляет дроссельной заслонкой, обрабатывая сигналы датчика скорости, выключателя и указателя режима, управляет исполнительным устройством, связанным с дроссельной заслонкой. В исполнительных устройствах используются вакуумный привод, малогабаритные электродвигатели и т. п.
Дата добавления: 2018-05-31 ; просмотров: 293 ; Мы поможем в написании вашей работы!
Электронные системы управления автомобилем
1. Электронный блок управления
В конструкциях автомобилей все более широкое применение находят электронные системы управления. По прогнозам специалистов в ближайшее десятилетие только 15…18 % изменений конструкции автомобилей будет отдано механике, основные изменения будут касаться электронных систем управления автомобилем.
При упрощенном рассмотрении электронной системы управления автомобилем можно выделить четыре основных блока (рис. 1): входные сигналы — датчики, системы передач данных, электронный (электронные) блок (блоки) управления (ЭБУ), исполнительные механизмы (ИМ).

Рис. 1. Схема электронной системы управления автомобилем
Электронный блок управления является самым сложным прибором систем управления двигателем или отдельных систем автомобиля и координирует их работу. Основу блока составляет центральный процессор или микрокомпьютер.
ЭБУ получает электрические сигналы от датчиков или генераторов в ожидаемом интервале значений, оценивает их, затем проводит вычисление пусковых сигналов для исполнительных устройств (приводов).
Входные сигналы могут быть цифровыми, аналоговыми и импульсными (рис. 2).
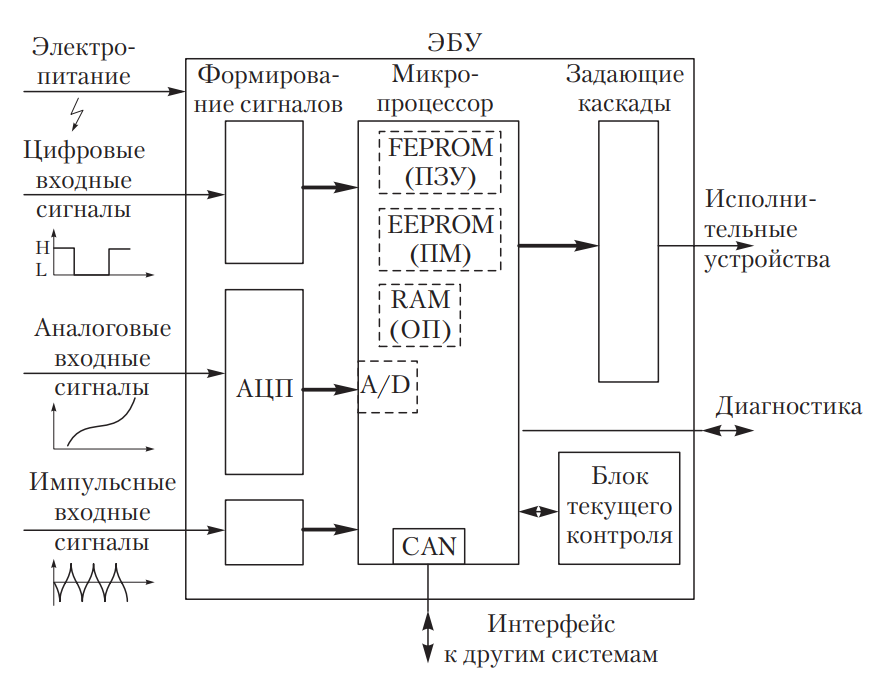
Рис. 2. Схема электронного блока управления:
Цифровые входные сигналы — это входные сигналы, которые имеют только два состояния: «высокий уровень» и «низкий уровень». Примеры цифровых входных сигналов: сигналы включения/ выключения, сигналы цифровых датчиков (например, импульсы от датчика Холла). Такие сигналы обрабатываются непосредственно микропроцессором.
Аналоговые входные сигналы в пределах заданного диапазона принимают значения напряжения. Физические величины, которые Н — высокий уровень сигнала; L — низкий уровень сигнала; FEPROM — программируемая память (постоянное запоминающие устройство, ПЗУ); EEPROM — постоянная память (ПМ); RAM — оперативная память (ОП); A/D — аналогово-цифровой преобразователь (АЦП); CAN — электронная цифровая шина данных рассматриваются как аналоги измеренных значений напряжения: массовый расход воздуха на впуске, напряжение аккумуляторной батареи, давление во впускном коллекторе и давление наддува, температура охлаждающей жидкости и воздуха на впуске. Аналогово-цифровой преобразователь (АЦП) преобразует эти значения в цифровые сигналы, с которыми затем микропроцессор проводит расчеты.
Разновидностью аналоговых сигналов являются быстро изменяющиеся сигналы напряжения, называемые импульсными входными сигналами. Импульсные входные сигналы от индуктивных датчиков, содержащие информацию о частоте вращения и положении вала (по метке), обрабатываются в их собственном контуре в ЭБУ. Здесь ложные импульсы подавляются, импульсные сигналы преобразуются в цифровые прямоугольные сигналы.
Для работы микропроцессору требуется программа, которая хранится в программируемой (перезаписываемой) памяти (постоянное запоминающие устройство — ПЗУ, или FEPROM). Эта память предназначена только для считывания информации. Она также содержит специальные фиксированные данные (индивидуальные данные, характеристические и программируемые матрицы, значения поправочных коэффициентов и данные, необходимые процессору для расчетов длительности управляющих импульсов форсунок, угла опережения зажигания и т.п.), которые не могут быть изменены во время управления автомобилем. Перезаписывающая память является энергонезависимой, т.е. вся занесенная в нее информация сохраняется при отключении энергопитания сколь угодно долго.
Оперативная память (RAM) служит для хранения таких изменяющихся данных, как численные значения сигналов. Для правильной работы ОП требуется постоянное электрическое питание. При отключении зажигания или выключателя пуска ЭБУ выключается и, следовательно, теряется вся память (так называемая испаряющаяся память). Адаптирующие значения величин, т.е. те, которые «обучаются» системой во время работы и касаются работы двигателя рабочих режимов, должны быть восстановлены при включении ЭБУ в работу.
Данные, которые нельзя терять (например, коды иммобилайзера и данные кодов неисправности), должны храниться в устройстве EEPROM (ПМ) — данные в ПМ не теряются даже в случае отсоединения аккумуляторной батареи.
Блок текущего контроля ЭБУ оснащается следящим контуром, который встроен в специализированную интегральную схему, которая оснащается повышенной оперативной памятью (extra RAM), усовершенствованными входными и выходными блоками и может генерировать и передавать сигналы широтно-импульсной модуляции. Микропроцессор и блок текущего контроля следят друг за другом и, как только обнаруживается неисправность, любой из них может выключить подачу топлива независимо от другого.
Используя выходные сигналы, микропроцессор запускает задающие каскады. Выходные сигналы обычно являются достаточно мощными, чтобы непосредственно управлять исполнительными устройствами или реле. Задающие каскады защищены от короткого замыкания на массу или аккумуляторную батарею и разрушения при электрической перегрузке. Такие нарушения в работе вместе с обрывами цепи или неисправностями датчиков определяются контроллером задающих каскадов, затем эта информация передается в микропроцессор. Выходные сигналы могут быть переключающими и сигналами широтно-импульсной модуляции.
Переключающие сигналы используются для включения и выключения исполнительных устройств (например, электровентилятора системы охлаждения двигателя). Сигналы широтно—импульсной модуляции (PWM signals) — это прямоугольные сигналы с постоянным периодом, но переменные по времени (рис. 3). Они могут быть использованы для пуска электромагнитных приводов (например, клапана системы рециркуляции ОГ — отработавших газов).
Встроенная диагностика. Одной из важных функций блока управления является непрерывная самодиагностика не только входных и выходных цепей компонентов, но и некоторых показателей внутреннего состояния системы. В современных ЭБУ осуществление самодиагностики занимает до 50 % ресурсов микрокомпьютера. В случае нахождения неисправностей в какой-либо цепи (например, отсутствие или несоответствие заданному уровню сигнала одного из датчиков) микропроцессор записывает соответствующий данной неисправности цифровой код в специальную область памяти, а для того чтобы получить информацию о характере неисправности, необходимо осуществить считывание кода из памяти компьютера.
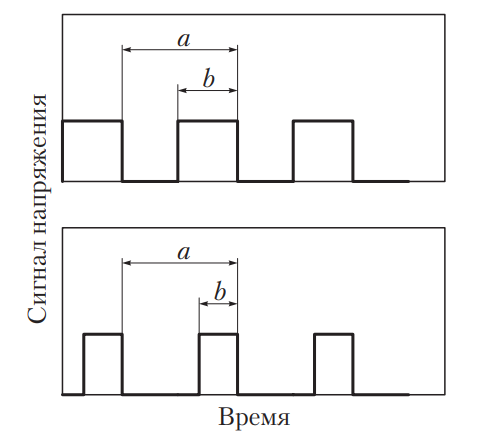
Рис. 3. Сигналы широтно-импульсной модуляции при разной длительности сигнала: а — постоянный период; b — длительность сигнала
ЭБУ постоянно контролирует исправность всех его компонентов, но ошибка помимо своего информационного значения несет флаг статуса, т.е. ошибки могут быть статические (текущие) и случайные (спорадические, накопленные).
Каждый раз при включении зажигания ЭБУ начинает анализировать работу своих датчиков и исполнительных устройств. Такой анализ длится все время, пока работает двигатель. При обнаружении дефекта ЭБУ фиксирует неисправность, выставляет код ошибки и использует аварийную ветвь программы управления. В случае если какой-либо входной сигнал отсутствует или заведомо неправильный, блок управления рассчитывает и использует вместо него некоторое теоретическое значение, что позволяет ему продолжать дальнейшее управление двигателем. Например, при выходе из строя датчика давления во впускном коллекторе для определения времени впрыска используется значение, рассчитанное исходя из частоты вращения коленчатого вала и положения дроссельной заслонки.
После выключения зажигания блок управления сохраняет код в ОЗУ.
2. Системы передачи данных
Современное автомобилестроение интенсивно внедряет инновационные технологии в системах управления. Общая тенденция в области автоматизации автомобилей состоит в замене традиционной централизованной системы управления распределенной системой управления путем соединения блоков управления интеллектуальных датчиков и исполнительных механизмов. Это вызвано ростом числа проводов связи, увеличением количества соединений, сложностью диагностирования автомобилей и снижением надежности. Увеличивающееся применение электронных систем управления автомобилей с обратной и без обратной связи требует, чтобы индивидуальные ЭБУ работали в сети друг с другом. Такие системы управления включают:
- управление коробкой передач;
- электронное управление двигателем или регулирование подачи топлива;
- антиблокировочную систему тормозов (ABS);
- противобуксовочную электронную систему (TCS);
- электронную систему курсовой устойчивости (ESP);
- систему управления тормозным моментом (MSR);
- электронный иммобилайзер (EWS);
- бортовой компьютер и т.д.
Обмен информацией между системами уменьшает общее количество необходимых датчиков и улучшает управление отдельными системами. Интерфейсы систем передачи информации, проектируемые для применения в автомобилях, могут быть подразделены на четыре категории:
- обычная передача данных;
- последовательная цифровая передача данных, т.е. сеть контроллеров (CAN);
- широкополосные шины передачи данных с временным разделением каналов (шина FlexRay);
- оптическая передача данных (шина типа МОSТ).
Обычная передача данных в автомобиле (рис. 4) характеризуется тем, что каждый сигнал имеет свой собственный канал связи (провод). При этом с каждой дополнительной информацией возрастает также число проводов и количество контактов на блоке управления, поэтому подобный тип передачи информации оправдывает себя только в случае ограниченного объема передаваемых данных.
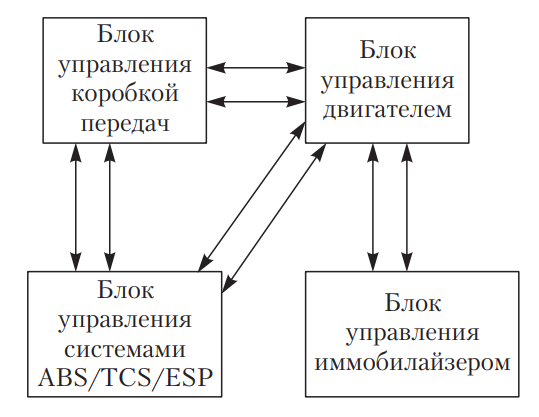
Рис. 4. Схема обычной передачи данных
Увеличение обмена данными между электрическими компонентами автомобиля уже достигли таких объемов, что дальнейшие попытки управления через обычные интерфейсы уже не удовлетворяют современные системы управления, поэтому стали применяться шины передачи данных.
В связи с возросшими требованиями передачи информации в автомобильных системах управления, вместо обычной электропроводки в современных автомобилях используется последовательная цифровая передача данных. Все более широкое распространение находят электронные цифровые шины данных CAN (Controller Area Network). Цифровая передача данных значительно надежнее обычной аналоговой, так как шина лучше защищена от помех, контакты надежно изолированы от внешних воздействий.
Шина данных CAN является открытой системой, к которой могут быть подключены как медные провода, так и стекловолоконные проводники. CAN-шина облегчает диагностику и ремонт вышедших из строя компонентов системы управления автомобилем. Универсальная проводка подходит и для разных комплектаций одного автомобиля — дополнительные устройства просто подключаются к нужным разъемам.
В зависимости от приоритетов и требований к скорости передачи данных шина CAN может быть одноили двухпроводной.
Если для работы систем достаточно низкой скорости передачи данных, то используются шины с одним проводом связи, если скорость передачи должна быть высокой — шины с двумя проводами связи. Второй провод используется для проверки правильности переданной модулем управления информации и для самоконтроля модуля. Данные передаются по обоим проводам одновременно. Сигнал на первом проводе представляет собой перевернутое повторение сигнала, передаваемого по второму проводу.
Все связанные через шину CAN блоки управления подключаются к ней параллельно. Один из проводов шины CAN называется верхним — CAN H (High), другой — нижним — CAN L (Low). Два невзаимозаменяемых скрученных провода (рис. 5) образуют пару (Twisted Pair).
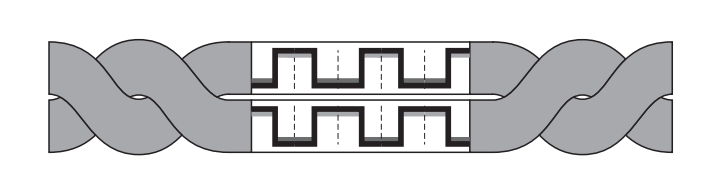
Рис. 5. Шина CAN
Скручивание проводов производится для того, чтобы ослабить помехи электромагнитного характера, а также излучающие помехи. Скручивание позволяет также устранить излучение шины, способное создать помехи в работе других устройств.
По проводу CAN H информация передается в виде электрических сигналов напряжением от 2,5 до 3,5 В, а по проводу CAN L — от 1,5 до 2,5 В (рис. 6). Разность напряжений, равная нулю, дает уровень логического нуля, а разность напряжений 2,0 В — уровень логической единицы.
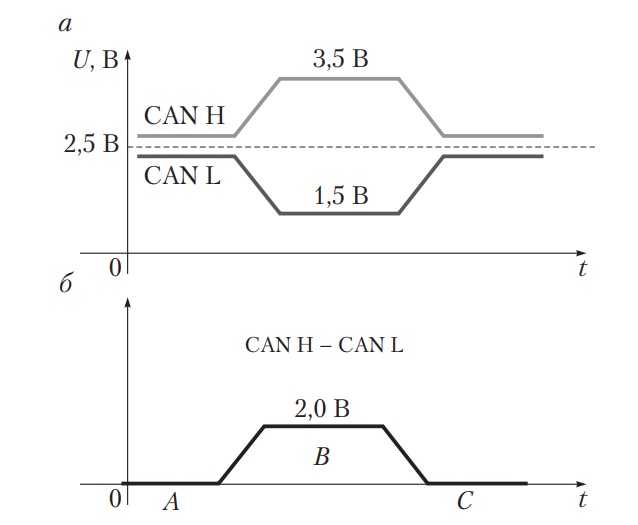
Рис. 6. Передача информации по шине CAN: а — напряжение; б — разность напряжений; А, С — логический уровень равен 0; B — логический уровень равен 1
CAN — мультимастерная шина, т.е. без центрального управляющего устройства. Все подключаемые к центральному или центральным блокам электронные блоки разных систем (или контроллеры) равноправны — любой имеет доступ к передаваемым данным и может сам их передавать.
CAN-шина относится к типу последовательных; передача данных в шине выполняется по протоколу в виде обмена сообщениями между блоками управления через очень короткие промежутки времени. Протокол состоит из последовательности бит* информации, передающихся друг за другом. Число бит в протоколе передачи данных зависит от размера поля данных.
* Бит — базовая единица измерения количества информации, равная количеству информации, содержащемуся в опыте, имеющем два равно вероятных исхода (да или нет).
Данные передаются бит за битом и в такой же последовательности принимаются. Биты составляют отдельные поля (рис. 7), из них складываются так называемые кадры — основные информационные единицы.
Начало кадра обозначает начало протокола передачи данных.
Арбитражное поле используется для обозначения приоритета протокола передачи данных. Например, если двум блокам управления требуется отправить сообщения одновременно, то первым отправляет сообщение в блок управления с более высоким приоритетом. Кроме того, арбитражное поле используется для определения содержания сообщения (например, частоты вращения коленчатого вала двигателя).
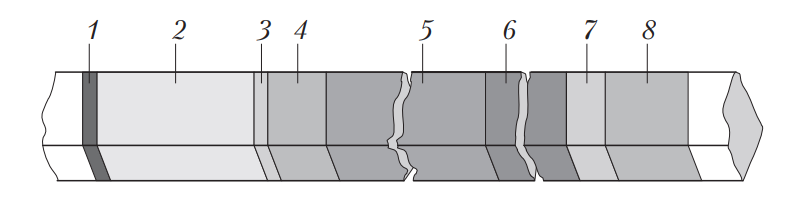
Рис. 7. Кадр передачи данных: 1 — начало кадра (1 бит); 2 — арбитражное поле (11 бит); 3 — неиспользуемое (запасное) поле (1 бит); 4 — поле управления (6 бит); 5 — поле данных (64 бита); 6 — поле обнаружения ошибок CRC (16 бит); 7 — поле сигнала приемника передатчику ACK (2 бита); 8 — конец кадра (7 бит)
В поле управления (контрольное поле) в виде кода записывается количество элементов информации в поле данных. Этим обеспечивается возможность для каждого приемника проверить, были ли получены все необходимые данные.
В поле данных передаются элементы данных, являющиеся важными для других блоков управления. Оно содержит больше всего информации: от 0 до 64 бит (от 0 до 8 байт).
Поле CRC используется для обнаружения ошибок в процессе передачи данных.
Поле ACK содержит сигнал приемника передатчику о том, что протокол данных был успешно выполнен. В случае обнаружения ошибки информация об этом немедленно поступает в передатчик и отправка сообщения повторяется.
Конец кадра предназначен для проверки передатчиком протокола данных и отправки приемнику подтверждения о его безошибочном выполнении. В случае обнаружения ошибки передача данных немедленно прекращается, а затем выполняется повторно. После этого протокол передачи данных считается выполненным.
Один кадр может включать несколько параметров, например, кадр, выдаваемый ЭБУ системы впрыска топлива, может состоять из следующих параметров:
- частота вращения коленчатого вала двигателя;
- средний эффективный крутящий момент двигателя;
- заданная водителем скорость движения;
- состояние системы круиз-контроля (включена или не включена);
- разрешение на включение компрессора кондиционера;
- величина крутящего момента двигателя без учета воздействия автоматической коробки передач.
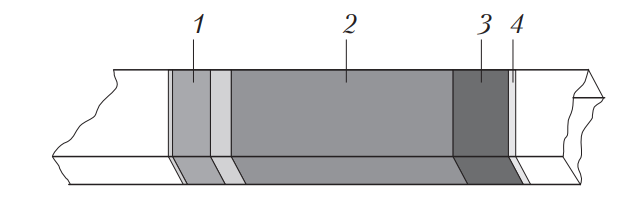
Рис. 8. Структура послания, передаваемого через шину CAN: 1 — идентификационный код послания (11 бит); 2 — содержание послания (до 8 × 8 бит); 3 — контрольная сумма (16 бит); 4 — подтверждение приема послания (2 бит)
Некоторые кадры выдаются периодически (например, кадр системы впрыска топлива — через каждые 10 с), другие — при наступлении какого-либо события (например, кадр, генерируемый ЭБУ подушек безопасности, выдается в случае удара, при этом выключается топливный насос, происходит разблокировка замков дверей и запрещается блокировка рулевой колонки).
Обмениваемая информация состоит из отдельных посланий, которые могут быть отправлены и получены каждым из блоков управления. Каждое из посланий (рис. 8), составленное согласно протоколу, содержит данные о каком-либо физическом параметре, например, о частоте вращения коленчатого вала.
Примером идентификационного кода послания может быть: двигатель, частота вращения коленчатого вала двигателя. В этом же послании могут содержаться и другие данные (например, указания о холостом ходе, передаче крутящего момента и других режимах работы двигателя). При этом величина частоты вращения представляется в двоичной форме, т.е. как последовательность нулей и единиц или бит (рис. 9). Например, значение частоты вращения двигателя 1800 об/мин может быть представлено как двоичное число 00010101.
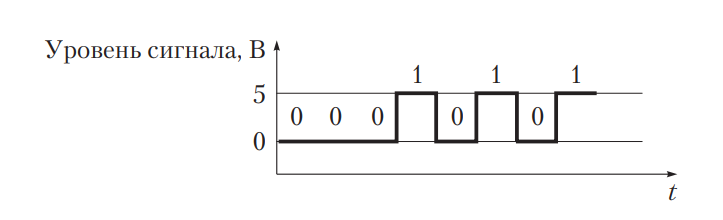
Рис. 9. Передача электрических сигналов по времени
Пример упрощенной передачи данных на примере угла положения дроссельной заслонки, который показывает, как строится информация, дан в табл. 1. Положение дроссельной заслонки от 0° до 102° передается с шагом 0,4° 8 битами, таким образом возможно 256 вариантов комбинаций битов.
Таблица 1. Зависимость изменения данных в шине от положения (угла) дроссельной заслонки
| Биты | Угол дроссельной заслонки |
| 0000 0000 | 000,0° |
| 0000 0001 | 000,4° |
| 0000 0010 | 000,8° |
| …… | |
| 0101 0101 | 034,0° |
| ……. | |
| 1111 1111 | 102,0° |
В современных автомобилях, как правило, применяются три вида шин, работающие с разными скоростями (рис. 10). Наиболее важные устройства и системы (антиблокировочная система тормозов, система курсовой устойчивости и др.) подключаются к скоростной магистрали с пропускной способностью 500…1000 Кб/с, практически обеспечивающей работу системы в реальном времени. Менее быстрые и важные приборы — система «Комфорт» или информационно-командная система (радио, монитор на центральной консоли, система навигации и кондиционирования) — завязаны на вторую шину со скоростью 95,2…100,0 Кб/с. Для остальных «медленных» устройств — система «Комфорт» (дверных замков, систем освещения, стеклоподъемников) — служит третья шина со скоростью 33,3…100,0 Кб/с.
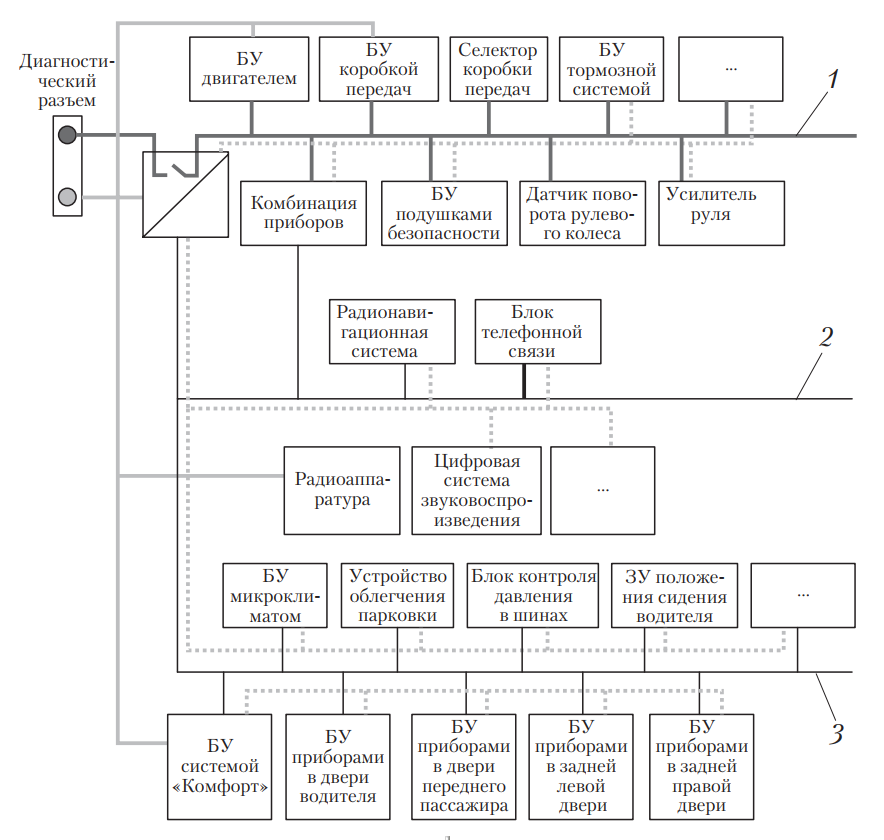
Рис. 10. Система шин CAN (на примере автомобиля Polo модели 2002 г.): 1 — шина наиболее важных устройств; 2 — шина информационно-командной системы; 3 — шина системы комфорта; БУ — блок управления; ЗУ — запоминающее устройство
Вместо ключа зажигания в автомобилях, оборудованных CAN-шинами, используют электронный брелок, который взаимодействует с блоком управления двигателем через цифровую шину. Возросшие требования к скорости передачи и безопасности данных требуют применения широкополосных шин передачи данных с временным разделением (временным управлением) каналов (для сравнения: CAN представляет собой событийно-управляемую шину данных).
Шина FlexRay — это последовательная, детерминистическая и устойчивая к сбоям шина передачи данных для применения в автомобиле; скорость передачи данных составляет 10 Мб/с, что в 20 раз превышает скорость передачи по высокоскоростной шине CAN (500 Кб/с).
Важной особенностью FlexRay является также гарантированное время реакции или латентный период реагирования, т.е. время, которое требуется на прохождение сообщения от отправителя до получателя. В связи с этим говорят также о детерминистической (предопределенной, регламентированной) передаче. Это означает, что данные поступают к адресату или адресатам в строго определенный или предварительно заданный момент времени (возможно применение в режиме реального времени).
Шина FlexRay двухпроводная: плюсовой провод обозначают красным цветом, минусовой — синим. Уровень напряжения на обоих проводах колеблется (рис. 11) от минимума (2,2 В) до максимума (2,8 В) (для сравнения в высокоскоростной шине CAN 1,5…3,0 В). Уровень разностного напряжения составляет не менее 600 мВ (в высокоскоростной шине CAN 2 В).
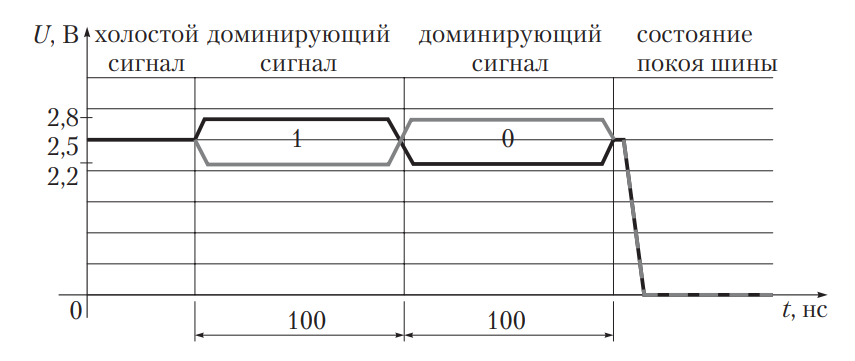
Рис. 11. Передача информации по шине FlexRay
FlexRay работает с тремя состояниями сигнала:
- холостой сигнал — уровень напряжения обоих проводов шины составляет 2,5 В (режим холостого хода). Рецессивный сигнал означает, что уровень напряжения может быть превышен (перезаписан) другим блоком управления;
- 1 — плюсовой провод имеет высокий, а минусовой — низкий доминирующий уровень напряжения;
- 0 — плюсовой провод имеет низкий, а минусовой — высокий доминирующий уровень напряжения.
Доминирующий сигнал означает, что этот уровень напряжения не может быть превышен (перезаписан) другими блоками управления.
При таких параметрах уровня напряжения время передачи 1 бит составляет 100 нс (наносекунд) (для сравнения в высокоскоростной шине 2000 нс).
Центральный блок информационно-командной системы может соединяться с процессором навигационной и других систем посредством оптического кабеля — шины типа МОSТ (Media Oriented Systems Transport). Это необходимо для защиты линии передачи данных от помех. Для передачи данных через оптический кабель следует преобразовать аналоговую информацию в серии световых импульсов, которые затем могут распространяться по стеклянным волокнам кабеля. Длина световых волн меньше длины радиоволны, поэтому они не создают электромагнитных помех и сами являются невосприимчивыми к таковым.
Вокруг любого проводника, по которому проходит электрический ток (рис. 12), возникают поля, поэтому проложенные параллельно или перекрещивающиеся проводники тока создают взаимные помехи. Помехи создаются также электромагнитными волнами, генерируемыми, например, мобильным телефоном. При использовании волоконно-оптической связи такие помехи отсутствуют.
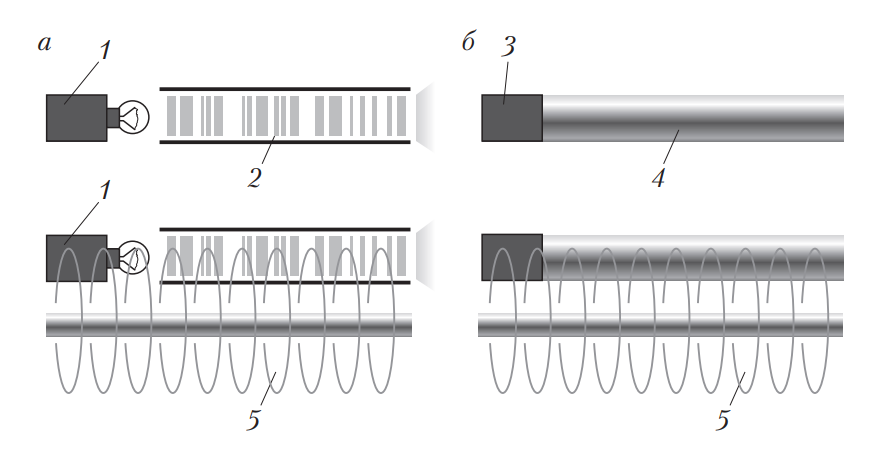
Рис. 12. Передача тока по волоконно-оптическому (а) и металлическому (б) проводникам: 1 — цифровая информация; 2 — оптический кабель; 3 — аналоговая или цифровая информация; 4 — металлический проводник; 5 — электромагнитное поле проводника
Преимуществом современных волокно-оптических систем, кроме отсутствия помех, является также скорость передачи данных, достигающая 21,2 Мб/с, что позволяет передавать информацию в виде цифрового сигнала. Такая связь применяется при приеме аудио- и видеопередач, что требует скорости передачи данных порядка 6 Мб/с и больше, в то время как шина CAN при большом количестве жил в жгуте проводов может передавать данные со скоростью не более 1 Мб/с.
Светодиод — один из основных компонентов волокно-оптической системы (рис. 13) предназначен для преобразования сигнала по напряжению в световой сигнал. Длина волны выработанных световых сигналов около 650 нм и их видно как красный свет. Световод предназначен для отправки световых волн, вырабатываемых в передатчике одного блока управления, на приемник другого блока управления. Фотодиод предназначен для преобразования световых волн в сигналы по напряжению.
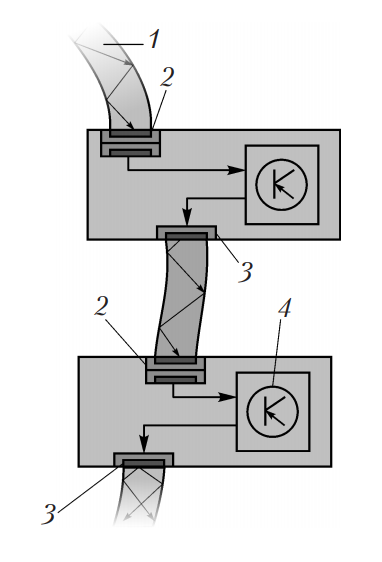
Рис. 13. Основные компоненты волокно-оптической системы: 1 — световод; 2 — фотодиод; 3 — светодиод; 4 — трансивер
Недостатком волокно-оптической системы является требование плавных изгибов; радиус изгиба световода не должен превышать 25 мм.
Шина типа MOST представляет шину последовательной передачи данных (аудио- и видеосигналов, голосовых сигналов) по оптическому кабелю (рис. 14). С точки зрения физического исполнения в случае шины MOST речь идет о кольцевой структуре (топологии) сети. Шина типа MOST может включать до 64 устройств.
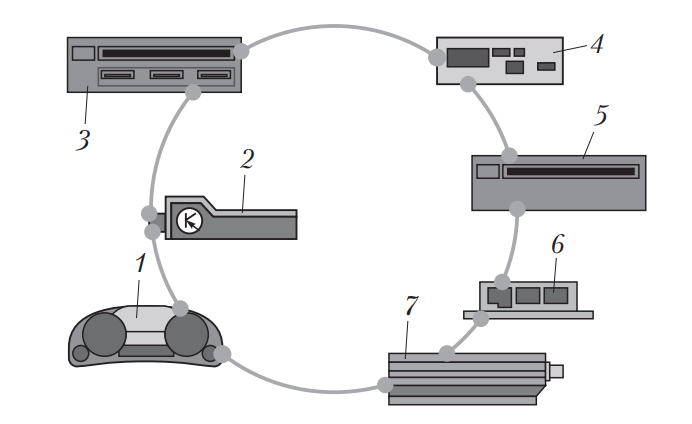
Рис. 14. Шина типа MOST (на примере Touareg 2011 Volkswagen): 1 — ЭБУ в комбинации приборов; 2 — диагностический интерфейс шин данных; 3 — ЭБУ информационной электронной системы; 4 — ТВ-тюнер; 5 — DVD-чейнджер; 6 — головное устройство аудиосистемы; 7 — ЭБУ цифровой аудиосистемы







