Асинхронные микродвигатели
 Обычно электрические двигатели делят на три группы: большой, средней и малой мощностей. Для двигателей малой мощности (будем называть их микродвигателями) верхнюю границу мощности не устанавливают, обычно это несколько сот ватт. Микродвигатели широко используют в приборах и аппаратах бытового назначения (сейчас в каждой семье имеется несколько микродвигателей — в холодильниках, пылесосах, магнитофонах, проигрывателях и пр.), измерительной технике, системах автоматического регулирования, авиации и космической технике и других областях человеческой деятельности.
Обычно электрические двигатели делят на три группы: большой, средней и малой мощностей. Для двигателей малой мощности (будем называть их микродвигателями) верхнюю границу мощности не устанавливают, обычно это несколько сот ватт. Микродвигатели широко используют в приборах и аппаратах бытового назначения (сейчас в каждой семье имеется несколько микродвигателей — в холодильниках, пылесосах, магнитофонах, проигрывателях и пр.), измерительной технике, системах автоматического регулирования, авиации и космической технике и других областях человеческой деятельности.
Первые электродвигатели постоянного тока появились еще в 30-е годы XIX столетия. Большой шаг в развитии электродвигателей был сделан в результате изобретения в 1856 г. немецким инженером Сименсом двухякорного преобразователя и открытия им в 1866 г. динамоэлектрического принципа. В 1883 г. Тесла, а в 1885 г. Феррари независимо друг от друга изобрели асинхронный двигатель переменного тока. В 1884 г. Сименс создал коллекторный двигатель пе-§ ременного тока с последовательной обмоткой возбуждения. В 1887 г. Хазельвандер и Доливо-Добровольский предложили конструкцию ротора с короткозамкнутой обмоткой типа «беличья клетка», что существенно упростило конструкцию двигателя. В 1890 г. Хитин и Лебланк впервые использовали фазосдвигающий конденсатор.
В бытовых электроприборах электродвигатели начали использовать с 1887 г. — в вентиляторах, с 1889 г. — в швейных машинах, с 1895 г. — в бормашинах, с 1901 г. -в пылесосах. Однако к настоящему времени потребность в микродвигателях оказалась настолько большой (в современной видеокамере используется до шести микродвигателей), что возникли специализированные фирмы и предприятия по их разработке и производству.
Однофазные асинхронные микродвигатели являются наиболее распространенным типом, они удовлетворяют требованиям большинства электроприводов приборов и аппаратов, отличаясь низкой стоимостью и уровнем шума, высокой надежностью, не требуют ухода и не содержат подвижных контактов.
Включение. Асинхронный микродвигатель может быть с одной, двумя или тремя обмотками. В однообмоточном двигателе нет начального пускового момента, и для его запуска нужно использовать, например, пусковой двигатель. В двухобмоточном двигателе одна из обмоток, называемая главной, непосредственно подключается к питающей сети (рис.1). Для создания пускового момента в другой, вспомогательной, обмотке должен протекать ток, сдвинутый по фазе относительно тока в главной обмотке. Для этого последовательно со вспомогательной обмоткой включают дополнительный резистор, который может иметь активный, индуктивный или емкостной характер.
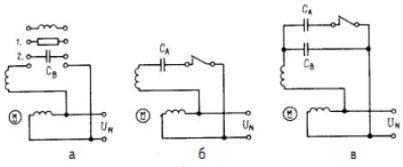
Наиболее часто в цепь питания вспомогательной обмотки включают конденсатор, получая при этом оптимальный угол сдвига фаз токов в обмотках, равный 90° (рис.1,6). Конденсатор, постоянно включенный в цепь питания вспомогательной обмотки, называется рабочим. Если при запуске двигателя необходимо обеспечить повышенный пусковой момент, то параллельно рабочему конденсатору Св на время пуска включают пусковой конденсатор Са (рис.1,в). После разгона двигателя до частоты вращения пусковой конденсатор отключается с помощью реле или центробежного выключателя. На практике чаще используют вариант рис.1,6.
Эффект сдвига фаз можно получить путем искусственного увеличения активного сопротивления вспомогательной обмотки. Это достигается либо включением дополнительного резистора, либо изготовлением вспомогательной обмотки из высокоомного провода. Из-за повышенного нагрева вспомогательной обмотки последнюю после запуска двигателя отключают. Такие двигатели дешевле и надежнее конденсаторных, хотя и не позволяют обеспечить фазовый сдвиг токов обмоток в 90°.
Для реверса направления вращения вала двигателя в цепь питания вспомогательной обмотки следует включить катушку индуктивности или дроссель, вследствие чего ток в главной обмотке будет опережать по фазе ток во вспомогательной обмотке. На практике этот способ применяется редко, так как сдвиг фаз получается незначительным из-за индуктивного характера сопротивления вспомогательной обмотки.
Чаще всего используют способ фазового сдвига между основной и вспомогательной обмотками, заключающийся в замыкании вспомогательной обмотки. Главная обмотка имеет магнитную связь со вспомогательной, благодаря чему при подключении главной обмотки к питающей сети во вспомогательной наводится ЭДС и возникает ток, отстающий по фазе от тока главной обмотки. Ротор двигателя начинает вращаться в направлении от главной к вспомогательной обмотке.
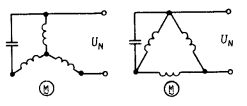
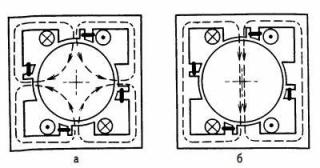
Трехобмоточный трехфазный асинхронный двигатель можно использовать в режиме однофазного питания. На рис.2 показано включение трехобмоточного двигателя по схемам «звезда» и «треугольник» в однофазный режим работы (схемы Штейнмеца). Две из трех обмоток непосредственно включены в питающую сеть, а третья подключена к напряжению питания через пусковой конденсатор. Для создания необходимого пускового момента последовательно с конденсатором необходимо включать резистор, сопротивление которого зависит от параметров обмоток двигателя.
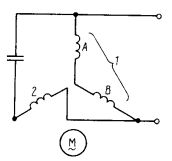
Обмотки. В отличие от трехобмоточных асинхронных двигателей, для которых характерны симметричное пространственное расположение и одинаковые параметры обмоток на статоре, в двигателях с однофазным питанием главная и вспомогательная обмотки имеют различные параметры. Для симметричных обмоток количество пазов на полюс и фазу можно определить из выражения: q = N/2pm, где N — количество пазов статора; m — количество обмоток (фаз); р — количество полюсов. В несимметричных обмотках количество пазов, занимаемых каждой обмоткой изменяется существенно. Поэтому главная и вспомогательная обмотки имеют различное количество витков. Характерным примером является 2/3-1/3 обмотка (рис.3), в которой 2/3 пазов статора занимает главная, а 1/3 — вспомогательная обмотка.
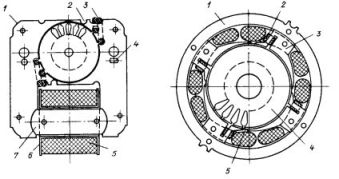
Конструкция. На рис.4 показано сечение двигателя с двумя сосредоточенными или катушечными обмотками, расположенными на полюсах статора. Каждая обмотка (главная 1 и вспомогательная 2) образована двумя катушками, расположенными на противоположных полюсах. Катушки надевают на полюса и вставляют в ярмо машины, имеющее в данном случае квадратную форму. Со стороны рабочего воздушного зазора катушки удерживаются специальными выступами, выполняющими функцию полюсных башмаков 3. Благодаря им кривая распределения индукции магнитного поля в рабочем воздушном зазоре приближается к синусоиде. Без этих выступов форма указанной кривой близка к прямоугольной. В качестве фазосдвигающего элемента для такого двигателя можно использовать как конденсатор, так и резистор. Можно также закорачивать вспомогательную обмотку. В этом случае двигатель преобразуется в асинхронную машину с расщепленными полюсами.
Двигатели с расщепленными полюсами используются чаще всего, благодаря своей конструктивной простоте, высокой надежности и низкой стоимости. Такой двигатель также имеет на статоре две обмотки (рис.5). Главная обмотка 3 изготовлена в виде катушки и включена непосредственно в питающую сеть. Вспомогательная обмотка 1 закорчена накоротко и содержит от одного до трех витков на полюс. Она охватывает часть полюса, чем и объясняется название двигателя. Вспомогательная обмотка изготовлена из медного провода круглой или плоской формы сечением в несколько квадратных миллиметров, который изгибается в витки соответствующей формы. Затем концы обмотки соединяют посредством сварки. Ротор двигателя выполнен коооткозамкнутым, причем на его концах крепят ребра охлаждения, которые улучшают отвод тепла от обмоток статора.
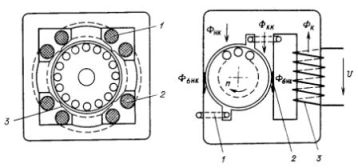
Варианты конструктивного исполнения двигателей с расщепленными полюсами показаны на рис.6 и 7. В принципе главная обмотка может располагаться симметрично или асимметрично относительно ротора. На рис.6 изображена конструкция двигателя с асимметричной главной обмоткой 5 (1 — крепежное отверстие; 2 — магнитный шунт; 3 — короткозамкнутая обмотка; 4 — отверстия крепления и юстировки; 6 — каркас обмотки; 7 — ярмо). Такой двигатель имеет значительное рассеяние магнитного потока во внешней магнитной цепи, поэтому его КПД не превышает 10-15%, и его изготавливают на мощность не более 5-10 Вт.
С точки зрения технологичности двигатель с симметрично расположенной главной обмоткой является более сложным. В двигателях мощностью 10-50 Вт используют составной статор (рис.7, где: 1 — кольцо ярма; 2 — короткозамкнутое кольцо; 3 — полюс; 4 — ротор с обмоткой «беличья клетка»; 5 — магнитный шунт). Ввиду того что полюсы двигателя охвачены ярмом и обмотки расположены внутри магнитной системы, магнитные потоки рассеяния здесь значительно меньше, чем в конструкции на рис.6. КПД двигателя 15-25%.
Для изменения частоты вращения двигателя с расщепленными полюсами используют схему с перекрестными полюсами (рис.8). В ней достаточно просто реализуется переключение числа пар полюсов обмотки статора, для изменения которых достаточно согласно включенные обмотки включить встречно. В двигателях с расщепленными полюсами используется также принцип регулирования частоты вращения, заключающийся в переключении катушек обмотки с последовательного соединения на параллельное.
Микродвигатели. Виды и устройство. Подключения и особенности
Электродвигатели с небольшой мощностью применяют в аппаратах и механизмах бытового назначения. В доме можно найти несколько микродвигателей: в магнитофонах, пылесосах, холодильниках, измерительной технике. Микродвигатели применяются в системах регулирования автоматического типа, авиации.
В технике бытового применения двигатели используют в пылесосах, бормашинах, швейных машинах, вентиляторах. Например, в конструкции видеокамеры имеется 6 микродвигателей. Сегодня необходимость в микродвигателях велика, появились специальные фирмы, производящие и разрабатывающие их.
Виды микродвигателей
Микродвигатели (МД) постоянного тока применяются для преобразования электрического тока в механическое вращение, называются исполнительными микродвигателями.
Виды микродвигателей разделяются на моторы с обычным, дисковым, полым и беспазовым якорем.
Микродвигатели с обычным якорем
В конструкции магнитный поток образуется возбуждающей обмоткой, находящейся на полюсах, либо постоянными магнитами. В первом варианте систему магнитов создают шихтованной, корпус и полюсы производят одним пакетом из листов, штампованных из профиля. Это требуется, так как микродвигатели эксплуатируются в переходных режимах.

При втором варианте на корпусе статора размещают мощный постоянный магнит формы цилиндра, либо несколько магнитов, сделанных в виде сердечников полюсов, скоб. В исполнительных моторах систему магнитов создают ненасыщенной, чтобы якорь не влиял на поток и на скорость вращения. Катушку якоря наматывают в пазах якоря и соединяют с ламелями коллектора по такому же принципу, как в обычном исполнении моторов постоянного тока.
Схема с полым якорем
Магнитный поток образуется от обмотки возбуждения или от постоянных магнитов. Якорь сделан в виде стакана, находящегося между полюсами и стоящим на месте сердечником из ферромагнитного материала. Его насаживают на втулку подшипникового щита. Внутри якоря вместо сердечника можно установить неподвижные постоянные магниты формы цилиндра. Катушку якоря наматывают на каркас, пропитывают эпоксидкой, концы катушки припаивают к пластинам. После застывания эпоксидки коллектор и якорь образуют монолит.

Инерционный момент полого якоря небольшой, повышается скорость двигателя. Из-за того, что нет насыщения зубцов, повышается индукция микродвигателя в воздушном пространстве микродвигателя, а, следовательно, и его момент вращения и магнитный поток в сравнении с микродвигателями с обычным якорем. Это также увеличивает быстродействие мотора.
Отрицательным явлением микродвигателей с полым якорем стала необходимость серьезного повышения МДС возбуждающей обмотки, потому что воздушный зазор намного больше, чем в моторах обычного вида. Это ведет к повышению веса, габаритов машины и снижения мощности в катушке возбуждения, но КПД этих микродвигателей из-за того, что нет потерь в стали, равен такому же значению, как в конструкции якоря обычного вида.
Микродвигатели с печатной обмоткой
Они имеют конструкцию диска и цилиндра. Дисковый имеет плоскую катушку якоря. Возбуждение создается магнитами с наконечниками из полюсов.
Этот тип микродвигателей оснащен плоской печатной катушкой якоря, которая нанесена на тонкий диск из текстолита или керамики. Возбуждение происходит постоянными магнитами с наконечниками в виде полюсов, сделанных как сегменты колец. Магнитный поток идет в направлении по двум воздушным зазорам и дискового якоря с печатной катушкой, замыкается на 2-х кольцах. Кольца сделаны из магнитномягкой стали, выполняют роль боковой поддержки. Магниты электрические или постоянные располагаются с одной или с двух сторон диска.
Печать катушки наносят на диск якоря химическим методом. Проводники расположены с двух сторон радиально, соединяются гальванически по сквозным отверстиям. Воздух является изоляцией проводников. Нанесение печати, соединения производится на станках, процесс механизирован. 
Все секции обмотки имеют в составе два проводника. Они находятся на разных сторонах диска. Количество активных проводников мало, ограничивается габаритами диска, для повышения напряжения используют обычную намотку волнового вида. Для снижения расстояния лобовых соединений, микродвигатели изготавливают с несколькими полюсами.
Иногда используют наконечники – полюсы. Они выходят за наружные соединения, становятся их частью. Для увеличения срока работы в конструкциях печатной катушки ставят коллектор. К нему подключают концы секций. В микродвигателях для быстродействия тормоза, от сигнала управления, диск изготавливают из алюминия, вместо изоляционного материала. Во время вращения диска образуются вихревые токи. Они образуют тормозной момент, зависящий от оборотов двигателя. Замедление сильно снижает число оборотов микродвигателя.
Достоинства с применением печатных катушек якоря:
- Слабый инерционный момент якоря, позволяет обеспечить быстродействие.
- Лучшая коммутация вследствие небольшой индуктивности, увеличивается срок эксплуатации щеток, увеличивается способность к перегрузкам микродвигателя.
- Хорошее охлаждение катушки печати, дает возможность увеличить плотность тока в проводах катушки якоря, снизить вес и габариты микродвигателей.
- Малое влияние якоря, нет ферромагнитных частей, поток по воздуху замыкается.
Отрицательные стороны в сравнении с обычными:
- Значительная движущая сила возбуждения, зазор увеличен.
- Большие потери из-за увеличенной плотности тока катушки якоря, при возбуждении магнитными силами, из-за износа проводов печатной катушки.
Цилиндрический якорь также находит свое использование в микродвигателях. Их конструкция похожа на моторы с полым якорем, отличие в методе намотки катушки якоря. На двух сторонах полого якоря способом электромеханического воздействия создают печатную катушку, концы подключают к коллектору. Микродвигатели с печатным якорем в виде цилиндра и с полым якорем имеют похожие свойства.
Микродвигатели асинхронного типа с одной фазой широко распространены. Они изготовлены с учетом требований многих приводов аппаратов и приборов, отличаются малой ценой и шумностью, надежны, не требуют техобслуживания, подвижные контакты отсутствуют.
Подключение
Микродвигатель асинхронного типа имеет различные типы конструкций по числу обмоток: с 1-й, 2-мя, 3-мя обмотками. С одной катушкой в моторе отсутствует момент запуска, надо применять специальный пусковой мотор. В моторе с двумя катушками одна из них главная, соединяется к сети питания.
Для образования запуска нужен ток, который сдвинут по фазе от главной катушки. С этой целью к вспомогательной катушке последовательно подсоединяют сопротивление. Оно может быть разного вида.

В схему питания дополнительной катушки подключают конденсатор. Получают угол между фазами 90 градусов. Конденсатор называют рабочим, так как он всегда подключен. При пуске нужно создать увеличенный момент, параллельно емкости Св во время пуска включают емкость пуска Са. Когда двигатель наберет обороты, пусковая емкость отключится от реле.
Для реверсивного направления вала в цепь дополнительной катушки подключают катушку индуктивности, ток пойдет впереди по фазе тока дополнительной катушки. Больше применяют метод сдвига фаз между главной и дополнительной катушками, дополнительную катушку закорачивают.
Основная катушка связана магнитной силой с дополнительной. При включении основной обмотки в другой катушке образуется движущая сила и ток, сдвинутый от основной обмотки. Вал мотора вращается в сторону от основной катушки к дополнительной.
Двигатель асинхронного типа на трех фазах и с 3-мя обмотками применяют в однофазной сети.

Для образования нужного момента пуска по последовательной схеме с конденсатором включают сопротивление, размер его зависит от размера катушек мотора.
Обмотки
В 1-фазных моторах обмотки имеют разные параметры, в отличие от моторов с тремя обмотками с одинаковыми свойствами.
Для катушек, расположенных симметрично, число пазов на один полюс определяют по формуле:
q = N / 2pm , где N — число пазов; m — число обмоток; р — число полюсов. В катушках несимметричного расположения число пазов значительно меняется, обе катушки различны по числу витков.
Конструкция
На рисунке двигатель с 2-мя сосредоточенными обмотками, по полюсам. Каждая катушка состоит из двух катушек по полюсам. Их надевают на сердечник и устанавливают в ярмо формы квадрата. Обмотки крепятся выступами.

График индукции поля потока в зазоре схож с синусоидой. Кривая похожа на прямоугольник, если нет выступов. Элемент, сдвигающий фазы, для такого мотора – конденсатор или резистор. Целесообразно подключить вспомогательную катушку, тогда двигатель преобразовывается в асинхронный тип с расщепленными полюсами.
Микродвигатели с расщепленными полюсами применяют из-за малой цены, хорошей надежности, простоты. На статоре есть две обмотки. Основная обмотка подключена сразу в сеть питания. Дополнительная обмотка соединена накоротко, имеет 1-3 витка на один полюс.
Она объединяет часть полюса, это дало название двигателю. Дополнительная обмотка сделана из медной жилы, она делается по соответствующей форме. Выводы катушки сваривают. Ротор мотора изготовлен короткозамкнутым, на концах закреплены охлаждающие ребра, они отводят тепло от катушек статора.
Варианты конструкции моторов изображены на схеме. Основная катушка расположена симметрично от ротора. Двигатель рассеивает магнитный поток в наружной магнитной цепи, КПД менее 15%, моторы изготавливают небольшой мощности до 10 Вт.
Мотор с симметричными обмотками в изготовлении требует сложного технологического процесса. Он состоит из составного статора, полюса, ротора, шунта магнитного. Полюсы мотора объединены ярмом, катушки находятся внутри системы, магнитные потоки меньше, чем у электродвигателя вышеописанной конструкции.

Для изменения числа оборотов двигателя применяют полюсы перекрестные. Переключение пар производится просто, чтобы их изменить необходимо катушки соединить встречной схемой. В моторах с полюсами расщепленного типа применяется регулирование числа оборотов, которое заключается в переключении с последовательной схемы на параллельную.







