- Пуск двигателя с фазным ротором
- Схема пуска асинхронного двигателя с фазным ротором, функции времени.
- Схема пуска двигателя с фазным ротором, функции тока.
- Схема подключения двигателя с фазным ротором, функции времени.
- Устройство, принцип работы и схема подключения асинхронного двигателя с фазным ротором
- Характеристика асинхронного двигателя
- Схема подключения
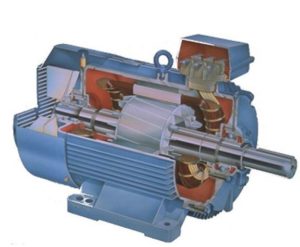
- Устройство двигателя
- Принцип работы
- Расчёт числа повторений
- Ремонт и характеристики неисправностей
Пуск двигателя с фазным ротором
Пусковые свойства асинхронного двигателя зависят от особенностей его конструкции, в частности от устройства ротора.
Пуск асинхронного двигателя сопровождается переходным процессом машины, связанным с переходом ротора из состояния покоя в состояние равномерного вращения, при котором момент двигателя уравновешивает момент сил сопротивления на валу машины.
При пуске асинхронного двигателя имеет место повышенное потребление электрической энергии из питающей сети, затрачиваемое не только на преодоление приложенного к валу тормозного момента и покрытие потерь в самой асинхронном двигателе, но и на сообщение движущимся звеньям производственного агрегата определенной кинетической энергии. Поэтому при пуске асинхронный двигатель должен развить повышенный вращающий момент.
Для асинхронного двигателя с фазным ротором начальный пусковой момент, соответствующий скольжению s п= 1, зависит от активных сопротивлений регулируемых резисторов, введенных в цепь ротора.
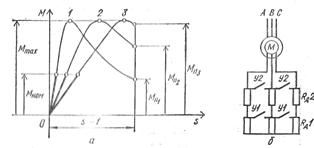
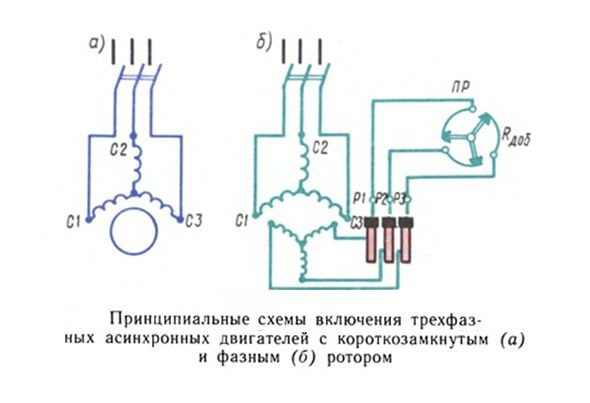
Рис. 1. Пуск трехфазного асинхронного двигателя с фазным ротором: а — графики зависимости вращающего момента двигателя с фазным ротором от скольжения при различных активных сопротивлениях резисторов в цепи ротора, б — схема включения резисторов и замыкающих контактов ускорения в цепь ротора.
Так, при замкнутых контактах ускорения У1, У2, т. е. при пуске асинхронного двигателя с замкнутыми накоротко контактными кольцами, начальный пусковой момент Мп1 = (0,5 -1,0) Мном, а начальный пусковой ток I п = (4,5 — 7) I ном и более.
Малый начальный пусковой момент асинхронного электродвигателя с фазным ротором может оказаться недостаточным для приведения в действие производственного агрегата и последующего его ускорения, а значительный пусковой ток вызовет повышенный нагрев обмоток двигателя, что ограничивает частоту его включений, а в маломощных сетях приводит к нежелательному для работы других приемников временному понижению напряжения. Эти обстоятельства могут явиться причиной, исключающей использование асинхронных двигателей с фазным ротором с большим пусковым током для привода рабочих механизмов.

Введение в цепь ротора двигателя регулируемых резисторов, называемых пусковыми, не только снижает начальный пусковой ток, но одновременно увеличивает начальный пусковой момент, который может достигнуть максимального момента Mmax (рис. 1 , а, кривая 3), если критическое скольжение двигателя с фазным ротором
s кр = ( R2′ + R д ‘) / ( Х1 + Х2 ‘) = 1 ,
где R д ‘ — активное сопротивление резистора, находящегося в фазе обмотки ротора двигателя, приведенное к фазе обмотки статора. Дальнейшее увеличение активного сопротивления пускового резистора нецелесообразно, так как оно приводит к ослаблению начального пускового момента и выходу точки максимального момента в область скольжения s > 1, что исключает возможность разгона ротора.
Необходимое активное сопротивление резисторов для пуска двигателя с фазным ротором определяют, исходя из требований пуска, который может быть легким, когда Мп = (0,1 — 0,4) M ном, нормальным, если Мп — (0,5 — 0,75) Мном, и тяжелым при Мп ≥ Мном.
Для поддержания достаточно большого вращающего момента двигателем с фазным ротором в процессе разгона производственного агрегата с целью сокращения длительности переходного процесса и снижения нагрева двигателя необходимо постепенно уменьшать активное сопротивление пусковых резисторов. Допустимое изменение момента в процессе разгона M(t) определяется электрическими и механическими условиями, лимитирующими пиковый предел момента М > 0,85 Ммах, момент переключения М2 > > Мс (рис. 2), а также ускорение.

Переключение пусковых резисторов обеспечено поочередным включением контакторов ускорения Y1, Y2 соответственно в моменты времени t1 , t2 отсчитываемые с момента пуска двигателя, когда в процессе разгона вращающий момент М становится равным моменту переключения М2. Благодаря этому на протяжении всего пуска все пиковые моменты получаются одинаковыми и все моменты переключения равны между собой.
Поскольку вращающий момент и ток асинхронного двигателя с фазным ротором взаимно связаны, то можно при разгоне ротора установить пиковый предел тока I1 = (1,5 — 2,5) I ном и ток переключения I 2, который должен обеспечить момент переключения М 2 > М c .
Отключение асинхронных двигателей с фазным ротором от питающей сети всегда выполняют при цепи ротора, замкнутой накоротко, во избежание появления перенапряжений в фазах обмотки статора, которые могут превысить номинальное напряжение этих фаз в 3 — 4 раза, если цепь ротора в момент отключения двигателя окажется разомкнутой.
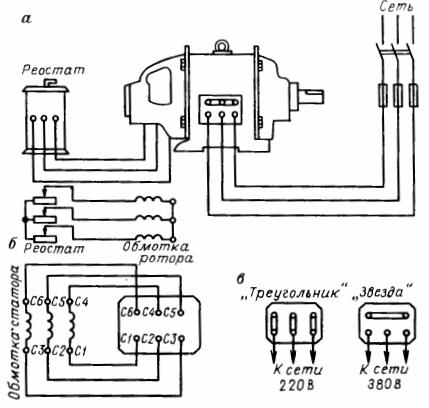
Рис. 3. Схема соединения обмоток двигателя с фазным ротором: а — к питающей сети, б — ротора, в — на доске зажимов.
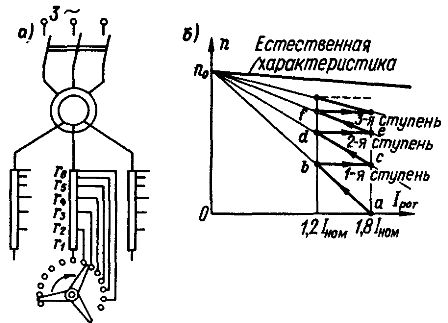
Рис. 4. Пуск двигателя с фазным ротором: а — схема включения, б — механические характеристики
Схема пуска асинхронного двигателя с фазным ротором, функции времени.

Для уменьшения пускового тока и увеличения пускового момента — в цепь ротора включают токоограничивающий резистор R, ступени которого включены в цепь не только вовремя пуска, и торможении, а также при реверсе электродвигателя с фазным ротором.
Двигатель будет разгоняться по искусственной характеристики с большим пусковым моментом и меньшим пусковым током. По мере разгона ступени резистора будут шунтироваться до полного вывода из цепи (обмотка ротора закорочена), а следовательно электродвигатель перейдёт на свою естественную характеристику. Пуск окончен.
Схема пуска двигателя с фазным ротором, функции тока.
Схема подключения двигателя с фазным ротором, функции времени.
Схема подключения двигателя фазным ротором представлена на рисунке 1. В данной схеме используется управление функции времени и двухступенчатый пусковой резистор.
Включением автоматического выключателя QF напряжение подается на управляющую и силовую цепь. Это приводит к срабатыванию реле времени КТ1, КТ2 которые размыкают свои контакты. Нажатием кнопки SB1 “ Пуск” подключается магнитный пускатель КМ3, который:
размыкает контакты:
- КМ3.3 — снимает напряжения с реле времени КТ1, которое, после окончания выдержки времени, размыкает свои контакты КТ1.
замыкает контакты:
- КМ3.1 в цепи статора — двигатель запускается с включенными в цепь ротора двумя ступенями резистора, так как контакторы КМ1 и КМ2 питания не получают. До истечении выдержки времени КТ1.
- КМ3.2 — шунтирует кнопку “ Пуск” (позволяет не удерживать кнопку SB1 в нажатом положении)
- КМ3.4 – в цепи катушек магнитных пускателей КМ1 и КМ2, но до окончания выдержки времени КТ1 пускатели КМ1 и КМ2 не получают питания.
 Рисунок 1.1 GIF — анимация схемы работы пуска асинхронного двигателя с фазным ротором
Рисунок 1.1 GIF — анимация схемы работы пуска асинхронного двигателя с фазным ротором
 Рисунок 1.1 GIF — анимация схемы работы пуска асинхронного двигателя с фазным ротором
Рисунок 1.1 GIF — анимация схемы работы пуска асинхронного двигателя с фазным ротором Для удобства просмотра — в конце статьи выложены все кадры анимации.
По истечении времени выдержки, КТ1 срабатывает и замыкает свои контакты – по катушке КМ1 протекает ток, пускатель срабатывает и шунтирует первую ступень пускового резистора R. Одновременно своими нормально замкнутыми контактами КМ1.1 обесточивает реле времени КТ2. До окончания выдержки времени КТ2 двигатель разгоняется только со второй ступенью сопротивления. После окончания выдержки резистор полностью шунтируется и двигатель переходит на свою естественную механическую характеристику. Пуск окончен.
Устройство, принцип работы и схема подключения асинхронного двигателя с фазным ротором
Асинхронный двигатель с фазным ротором имеет очень обширную область обслуживания. АД (асинхронный двигатель) чаще применяется в управлении двигателями большой мощности. Обслуживание и управление приводов мельниц, станков, насосов, кранов, дымососа, дробилок. Асинхронный двигатель с массивным ротором даёт возможность подключения множества технических механизмов.
Характеристика асинхронного двигателя
 Преимущества использования:
Преимущества использования:
- Запуск двигателя с нагрузкой, подключение к валу благодаря созданию большого момента вращения. Это обеспечивает обслуживание асинхронных двигателей с фазовым элементом любой мощности.
- Возможность постоянной скорости вращения большой или маленькой нагрузки
- Регулирование автоматического пуска.
- Работа даже при перегрузке тока напряжения.
- Простота использования.
- Невысокая стоимость.
- Надёжность применения.
- Использование резисторов увеличивается стоимость, а работа двигателя усложняется,
- Большие размеры,
- Значение КПД меньше, чем короткозамкнутых роторов,
- Трудное управление скоростью вращения,
- Регулярный капитальный ремонт .
Схема подключения
При подключении к току начинают работать реле времени. Контакты размыкаются. При нажатии тумблера происходит пуск.
Чтобы подключить АД нужно правильно обозначить концы и начала обмоток фазы.
Устройство двигателя
Главными постоянными являются статор и ротор. Статор представляет собой цилиндр, состав –листы электротехнической стали, в цилиндр уложена трёхфазная обмотка. Она состоит из обмоточной проволоки. Которые соединены между собой в виде звезды или треугольника в зависимости от напряжения.
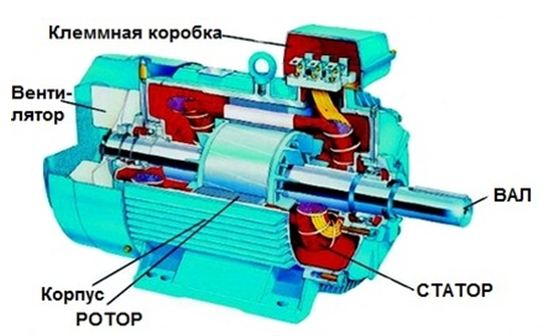
Ротор – основная вращающаяся часть двигателей. Он в зависимости от расположения может быть внешним, внутренним. Данный элемент состоит из стальных листов. Пазы сердечника наполнены алюминием, который имеет стержни, содержащие торцевые кольца. Они могут быть латунными или стальными, каждое из них изолировано слоем лака. Между трёхфазным статором и ротором образуется зазор. Регулирование размер зазора от 0,30 –0,34 мм в устройствах с небольшим напряжением, 1,0–1,6 мм в устройствах с большим постоянным электрическим напряжением. Конструкция имеет название беличья клетка. Для мощных двигателей используется медь в сердечнике. Контактор начинает действие, двигатель заводится.
Существует добавочный резистор в цепи обмотки вращающей части машины, крепится с помощью металлографитных щеток. Щетки обычно используются две, расположены на щеткодержателе. В приводах кранах и центрифугах для регулирования роботы применяется конический подвижный ротор. Асинхронные двигатели с фазным ротором незаменимы при технических требованиях мощного пускового момента. Это могут быть такие механизмы, как кран, мельница, лифт.
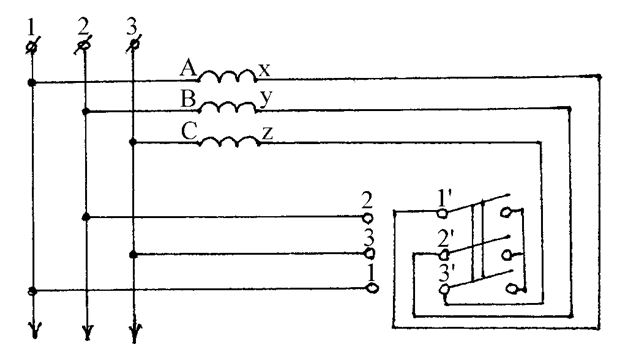
Схема переключения электрической цепи со звезды на треугольник
Принцип работы
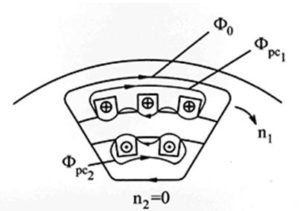
В основе АД лежит вращение поля магнитов. В область обмотки трёхфазного статора поступает ток, а в фазах возникает поток магнитов, изменяемый в зависимости от скорости и частоты постоянной электрической мощности. При статорном вращении возникает электродвижущая сила.
В роторную обмотку подходит напряжение, которое совместно с постоянным магнитным потоком статора образует пуск. Он стремится направить ротор по магнитному вращению статора и при достижении превышения момента торможения, приводит к скольжению. Оно выражает отношение между частотами статорного силового поля магнитов и скоростью роторного вращения.
Чертеж режима кз
При балансе между моментами электромагнита и торможения, перемена значений остановится. Особенность эксплуатации АД – сольватация кругового движения силового поля статора и им наводящих токов в роторе. Момент вращения возникает лишь при разнице частот круговых движений магнитных полей.
Машины различают синхронные, асинхронные. Разница механизмов в их обмотке. Она образует магнитное поле.
Неподвижность ротора и замыкание обмотки приводит к короткому замыканию (кз).
Расчёт числа повторений
Возьмём m1 – процесс повторения постоянного поля магнитов и ротора. Система фазы переменного тока образуют вращение поля магнитов.
Данные расчета считаются по формуле:
f1– частота электричества$
p – количество полюсных пар каждой обмотки статора.
m2 – процесс повторения вращения ротора. Имея различное количество одновременных повторений, данная скорость частоты будет асинхронной. Определение расчёта частоты проводится по соотношению между данными:
Асинхронный электродвигатель работает только при асинхронной частоте.
(m2 Реостатный пуск
Часто для включения двигателя безмощных пусковых моментов оказывают нужное действие реостаты. Схема реостатного способа:
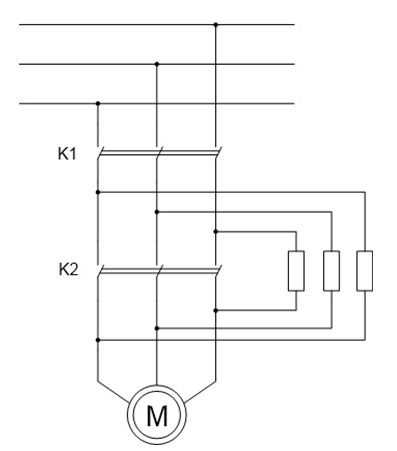
Главной характеристикой метода является присоединение двигателя при пуске к реостатам. Реостаты разрываются (на чертеже К1), на них идет частично электрический ток. Что дает возможность уменьшить пусковые токи. Пусковой момент тоже снижается. Преимущество реостатного способа заключается в снижении нагрузки на механическую часть и нехватку напряжения.
Ремонт и характеристики неисправностей
Причиной ремонта могут служить внешние и внутренние причины.
Внешние причины ремонта:
- обрыв провода или нарушение соединений с электрическим током,
- сгорание предохранителей,
- понижение или повышения напряжения,
- перегруженность АД,
- неравномерная вентиляция в зазоре.
Внутренняя поломка может возникнуть по механическим и электрическим причинам.
Механические причины ремонта:
- неправильное регулирование зазора подшипников,
- повреждение вала ротора,
- расшатывание щеткодержателей,
- возникновение глубоких выработок,
- истощение креплений и трещины.
Электрические причины ремонта:
- замыкания витков,
- поломка провода в обмотках,
- пробивание изоляции,
- пробой пайки проводов.
Данные причины – это далеко не полный список поломок.
Асинхронный двигатель – незаменимый и важный механизм, применяемый для обслуживания быта и различных отраслей промышленности. Для практического действия АД с фазным ротором необходимо знать техническую характеристику управления, использовать его по назначению и регулярно проводить ремонт при технических осмотрах. Тогда асинхронный двигатель станет практически вечной эксплуатации.







