Виды возбуждения и схемы включения двигателей постоянного тока.
Двигатели постоянного тока в зависимости от способов их возбуждения, как уже отмечалось, делятся на двигатели с независимым, параллельным (шунтовым), последовательным (сериесным) и смешанным (компаундным) возбуждением.
Двигатели независимого возбуждения, рис.8,а, требуют два источника питания. Один из них необходим для питания обмотки якоря (выводы Я1 и Я2 ), а другой — для создания тока в обмотке возбуждения (выводы обмотки Ш1 и Ш2). Дополнительное сопротивление Rд в цепи обмотки якоря необходимо для уменьшения пускового тока двигателя в момент его включения.
С независимым возбуждением выполняются в основном мощные электрические двигатели с целью более удобного и экономичного регулирования тока возбуждения. Сечение провода обмотки возбуждения определяется в зависимости от напряжения ее источника питания. Особенностью этих машин является независимость тока возбуждения, а соответственно и основного магнитного потока, от нагрузки на валу двигателя.
Двигатели с независимым возбуждением по своим характеристикам практически совпадают с двигателями параллельного возбуждения.
Двигатели параллельного возбуждения включаются в соответствии со схемой, показанной на рис.8,6. Зажимы Я1 и Я2относятся к обмотке якоря, а зажимы Ш1 иШ2 — к обмотке возбуждения (к шунтовой обмотке). Переменные сопротивления Rд и Rвпредназначены соответственно для изменения тока в обмотке якоря и в обмотке возбуждения. Обмотка возбуждения этого двигателя выполняется из большого количества витков медного провода сравнительно малого сечения и имеет значительное сопротивление. Это позволяет подключать ее на полное напряжение сети, указанное в паспортных данных.
Особенностью двигателей этого типа является то, что при их работе запрещается отсоединять обмотку возбуждения от якорной цепи. В противном случае при размыкании обмотки возбуждения в ней появится недопустимое значение ЭДС, которое может привести к выходу из строя двигателя и к поражению обслуживающего персонала. По той же причине нельзя размыкать обмотку возбуждения и при выключении двигателя, когда его вращение еще не прекратилось. •
С увеличением частоты вращения его следует уменьшать, а при достижении установившейся частоты вращения — вывести
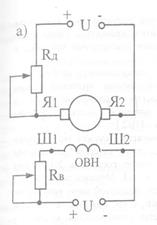
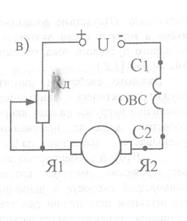
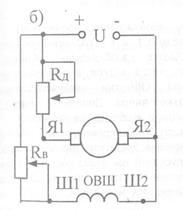
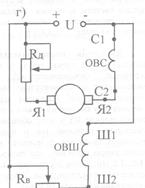
Рис. 8. Виды возбуждения машин постоянного тока,
а — независимого возбуждения , б — параллельного возбуждения,
в — последовательного возбуждения, г — смешанного возбуждения.
ОВШ — обмотка возбуждения шунтовая, ОВС — обмотка возбуждения
сериесная,’ ОВН — обмотка независимого возбуждения, Rд —
Долнительное сопротивление в цепи обмотки якоря, Rв- Дополнительное сопротивление в цепи обмотки возбуждения.
полностью. Отсутствие дополнительного сопротивления в обмотке якоря в момент пуска двигателя может привести к появлению большого пускового тока, превышающего номинальный ток якоря в 10. 40 раз [1,2].
Важным свойством двигателя параллельного возбуждения служит’ практически постоянная его частота вращения при изменении нагрузки на валу якоря. Так при изменении нагрузки от холостого хода до номинального значения частота вращения уменьшается всего лишь на (2.. 8)% [1,12].
Второй особенностью этих двигателей служит экономичное регулирование частоты вращения, при котором отношение наибольшей скорости к наименьшей может составлять 2:1, а при специальном исполнении двигателя — 6:1. Минимальная частота вращения ограничивается насыщением магнитной цепи, которое не позволяет уже увеличивать магнитный поток машины, а верхний предел частоты вращения определяется устойчивостью машины — при значительном ослаблении магнитного потока двигатель может пойти «вразнос» [1,3,4,6].
Двигатели последовательного возбуждения (сериесные) включаются по схеме, рис.8, в. Выводы С1 и С2 соответствуют сериесной (последовательной) обмотке возбуждения. Она выполняется из сравнительно малого числа витков в основном медного провода большого сечения. Обмотка возбуждения соединяется последовательно с обмоткой якоря. Дополнительное сопротивление Rд в цепи обмоток якоря и возбуждения позволяет уменьшить пусковой ток и производить регулирование частоты вращения двигателя. В момент включения двигателя оно должно иметь такую величину, при которой пусковой ток будет составлять (1,5. 2,5)Iн. После достижения двигателем установившейся частоты вращения дополнительное сопротивление Rд выводится, то есть устанавливается равным нулю.
Эти двигатели при пуске развивают большие пусковые моменты вращения и должны запускаться при нагрузке не менее 25% ее номинального значения. Включение двигателя при меньшей мощности на его валу и тем более в режиме холостого хода не допускается. В противном случае двигатель может развить недопустимо большие обороты, что вызовет выход его из строя [1,6,12 ]. Двигатели этого типа широко применяются в транспортных и подъемных механизмах, в которых необходимо изменять частоту врашения в широких пределах.
Двигатели смешанного возбуждения (компаундные), рис.8, г, занимают промежуточное положение ?» между двигателями параллельного и последовательного возбуждения. Большая принадлежность их к тому или другому виду зависит от соотношения частей основного потока возбуждения, создаваемых параллельной или последовательной обмотками возбуждения. В момент включения двигателя для уменьшения пускового тока в цепь обмотки якоря включается дополнительное сопротивление Rд. Этот двигатель обладает хорошими тяговыми характеристиками и может работать в режиме холостого хода.
Прямое (безреостатаное) включение двигателей постоянного тока всех видов возбуждения допускается мощностью не более одного киловатта.
6. Обозначение машин постоянного тока.
В настоящее время наиболее широкое распространение получили машины постоянного тока общего назначения серии 2П и наиболее новой серии 4П. Кроме этих серий выпускаются двигатели для крановых, экскаваторных, металлургических и других приводов серии Д. Изготавливаются двигатели и специализированных серий [5,6,8].
Двигатели серий 2П и 4Пподразделяются по оси вращения, как это принято для асинхронных двигателей переменного тока серии4А. Машины серии2П имеют 11 габаритов, отличающихся по высоте вращения оси от 90 до 315 мм. Диапазон мощностей машин этой серии составляет от 0,13 до 200 кВт для электрических двигателей и от 0,37 до 180 кВт для генераторов. Двигатели серий 2П и 4П рассчитываются на напряжение 110, 220, 340 и 440 В. Их номинальные частоты вращения составляют 750, 1000, 1500,2200 и 3000 об/мин.
Каждый из 11 габаритов машин серии 2П имеет станины двух Длин ( М и L ).
Электрические машины серии 4П имеют лучшие некоторые технико — экономические показатели по сравнению с серией 2П. 1 рудоемкость изготовления серии 4П по сравнению с 2П снижена в 2,5. 3 раза.’ При этом расход меди снижается на 25. 30 %. По ряду конструктивных особенностей, в том числе по способу охлаждения, по защите от атмосферных воздействий, по использованию отдельных деталей и узлов машины серии 4П унифицированы с асинхронными двигателями серии 4АиАИ [10,11].
Обозначение машин постоянного тока (как генераторов, так и двигателей) представляется следующим образом:
2ПХ1Х2ХЗХ4 ,
где 2П — серия машины постоянного тока;
XI — исполнение по типу защиты: Н — защищенное с самовентиляцией, Ф — защищенное с независимой вентиляцией, Б — закрытое с естественным охлаждением, О — закрытое с обдувом от постороннего вентилятора;
Х2 — высота оси вращения ( двухзначное или трехзначное число) в мм;
ХЗ— условная длина статора: М — первая, L — вторая, Г — с тахогенератором;
Х4 — климатическое исполнение и категория размещения: У — умеренный климат, Т — тропический климат.
В качестве примера можно привести обозначение двигателя 2ПН112МГУ — двигатель постоянного тока серии 2П, защищенного исполнения с самовентиляцией Н,112 высота оси вращения в мм, первый размер статораМ, укомплектован тахогенератором Г, используется для умеренного климатаУ.
По мощностям электрические машины постоянного тока условно могут быть подразделены на следующие группы [12]:
Микромашины ………………………. меньше 100 Вт,
Мелкие машины ………………………от 100 до 1000 Вт,
Машины малой мощности…………..от 1 до 10 кВт,
Машины средней мощности………..от 10 до 100 кВт,
Крупные машины……………………..от 100 до 1000 кВт,
Машины большой мощность……….более 1000 кВт.
По номинальным напряжениям электрические машины подразделяются условно следующим образом:
Низкого напряжения…………….меньше 100 В,
Среднего напряжения ………….от 100 до 1000 В,Высокого напряжения
По частоте вращения машины постоянного тока могут быть представлены как:
Тихоходные…………….менее 250 об/мин.,
Средней скорости………от 250 до 1000 об/мин.,
Быстроходные………….от 1000 до 3000 об/мин.
Сверхбыстроходные…..выше 3000 об/мин.
| | | следующая лекция ==> | |
| Принцип получения ЭДС генераторов постоянного тока. | | | Задание и методика выполнения работы. |
Дата добавления: 2019-04-03 ; просмотров: 1647 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
билеты_ЭМ / 17.Характеристики двигателя постоянного тока независимого возбуждения
17. Характеристики двигателя постоянного тока независимого возбуждения
Схема включения двигателя постоянного тока с независимым возбуждением (рис. 4.1), когда для питания цепи возбуждения используется отдельный источник постоянного тока, находит применение в регулируемых электроприводах[1].
Якорь двигателя М и его обмотка возбуждения LМ обычно получают питание от разных, независимых друг от друга источников напряжения U и UВ, что позволяет отдельно регулировать напряжение на якоре двигателя и на обмотке возбуждения. Направление тока I и эдс вращения двигателя Е, показанные на рис. 4.1, соответствуют двигательному режиму работы, когда электрическая энергия потребляется двигателем из сети: Рэ = Uc I и преобразуется в механическую, мощность которой Рм = М ω. Зависимость между моментом М и частотой вращения ω двигателя определяется его механической характеристикой.

Рис. 4.1. Схема включения двигателя постоянного тока независимого возбуждения: а – цепи якорной обмотки; б – цепи возбуждения
При установившемся режиме работы двигателя приложенное напряжение U уравновешивается падением напряжения в якорной цепи I∙R и наведенной в якоре эдс вращения Е, т.е.
 , (4.1)
, (4.1)
где I – ток в якорной цепи двигателя; R = Rя + Rр1 – суммарное сопротивление якорной цепи, Ом, включающее внешнее сопротивление резистора Rp1 и внутреннее сопротивление якоря двигателя Rя (при наличии дополнительных полюсов учитывается и их сопротивление):
 , (4.2)
, (4.2)
где k – конструктивный коэффициент двигателя; k = pN/2a (р – число пар полюсов двигателя; N – число активных проводников обмотки якоря; 2а – число пар параллельных ветвей обмотки якоря; Ф – магнитный поток двигателя.
Подставив в уравнение баланса напряжений якорной цепи выражение для Е и выразив ω, получим:
 . (4.3)
. (4.3)
Это уравнение называется электромеханической характеристикой двигателя.
Для получения механической характеристики необходимо найти зависимость скорости от момента двигателя. Запишем формулу связи момента с током якоря двигателя и магнитным потоком:
 . (4.4)
. (4.4)
Выразим ток якоря двигателя через момент и подставим в формулу электромеханической характеристики:
 , (4.5а)
, (4.5а)
 , (4.5б)
, (4.5б)
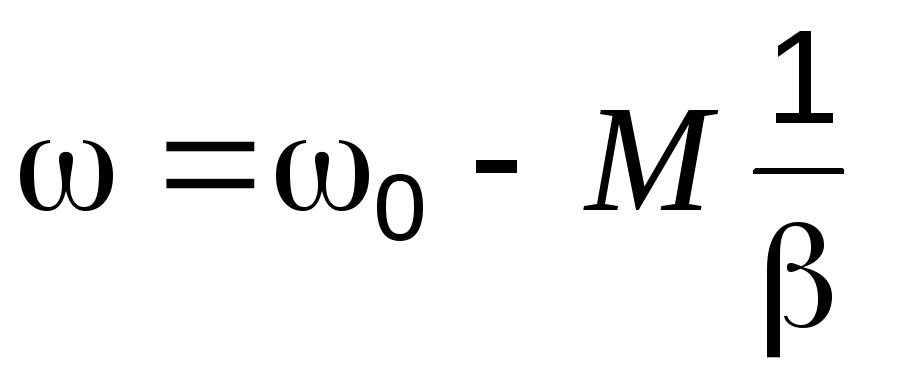
где ω0 = U / kФ – частота вращения машины в режиме идеального холостого хода; β = (kФ)2 / R – жёсткость механический характеристики машины[2].

Механическая характеристика двигателя при неизменных параметрах U, R и Ф представляется прямой линией 1 (рис. 4.2).
На холостом ходу (М = 0) двигатель вращается с частотой вращения w0. По мере увеличения момента нагрузки частота вращения снижается, номинальному моменту нагрузки МН соответствует номинальная частота вращения w0. Изменение величины питающего напряжения вызывает пропорциональное уменьшение частот вращения во всех режимах работы. При этом жесткость механической характеристики b сохраняется, так как его величина, согласно (4.5б), определяется сопротивлением якорной цепи, конструктивным коэффициентом и магнитным потоком машины.
Согласно (4.5), путем изменения величины питающего напряжения U от нуля до номинального значения (например, при помощи управляемого тиристорного выпрямителя), можно изменять частоту вращения вала в широких пределах, что подтверждается рис. 4.2 (характеристиками 2). При этом диапазон плавного и экономичного регулирования частоты вращения – глубина регулирования – находится по формуле
 , (4.6)
, (4.6)
где wmax, wmin – максимально и минимально возможные частоты вращения при данном способе регулирования.
Практически значение глубины регулирования достигает 10…100 тыс. Столь большой диапазон регулирования позволяет исключить или значительно упростить механическую трансмиссию.
Вторым способом регулирования частоты вращения двигателя является изменение сопротивления якорных цепей – путём включения последовательно в цепь якоря регулировочного резистора RР1 (рис. 4.1). В этом случае, согласно (4.5), при увеличении сопротивления жесткость характеристики машины уменьшается (рис. 4.2, линии 3). Как видно из рис. 4.2, частота вращения машины при идеальном холостом ходе: М = 0 не изменяется, а с ростом момента нагрузки частота вращения снижается значительно (β уменьшается). Данный способ регулирования позволяет изменять частоту вращения в значительном диапазоне, однако вследствие значительных потерь мощности в регулировочном резисторе резко снижается кпд привода:

Регулирование частоты вращения машины постоянного тока магнитным потоком машины Ф – за счёт изменения тока возбуждения резистором RР2 (см. рис. 4.1) – является экономичным способом, так как потери в резисторе RР2 не велики вследствие малого тока возбуждения. Однако этот способ позволяет лишь увеличивать частоту вращения по сравнению с номинальной (глубина регулирования не превышает D = 2…3). Такой способ регулирования предусмотрен для большинства машин[3].
Ранее была рассмотрена работа двигателя независимого возбуждения в двигательном режиме, чему соответствовали механические характеристики, представленные на рис. 4.2 и расположенные в первом квадранте координатных осей. Однако этим не исчерпываются возможные режимы работы электродвигателя и его механические характеристики. Весьма часто в современных электроприводах необходимо быстро и точно остановить механизм или изменить направление его движения. Быстрота и точность, с какой будут проделаны эти операции, во многих случаях определяют производительность механизма. Во время торможения или перемены направления движения (реверса) электродвигатель работает в тормозном режиме на одной из механических характеристик, соответствующих осуществляемому способу торможения. Графическое изображение механических характеристик машины независимого возбуждения для разных режимов работы представлено на рис. 4.3.[4]
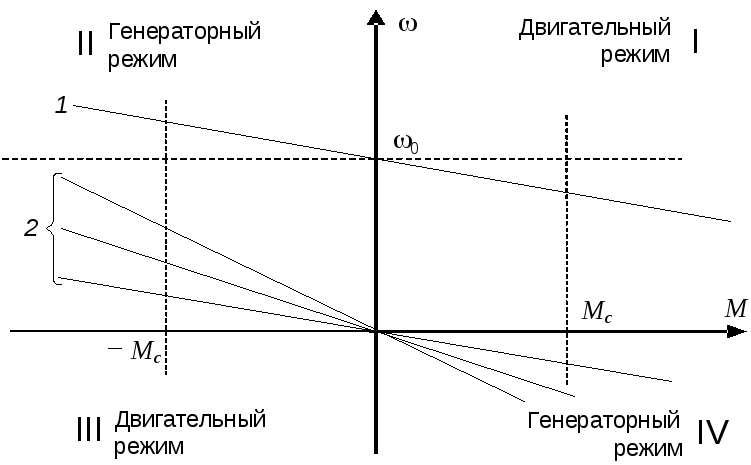
Рис. 4.3. Механические характеристики двигателя постоянного тока независимого возбуждения при различных режимах работы: 1 – механическая характеристика при номинальном напряжении на якоре; 2 – механическая характеристика при напряжении на якоре, равном нулю
Здесь, кроме участка характеристик, соответствующих двигательному режиму (квадрант I), показаны участки характеристик в квадрантах II и IV, характеризующие три возможных способа генераторного электрического торможения, а именно:
1) торможение с отдачей энергии в сеть (рекуперативное);
2) динамическое торможение;
3) торможение противовключением.
Рассмотрим подробнее особенности механических характеристик при указанных способах торможения.
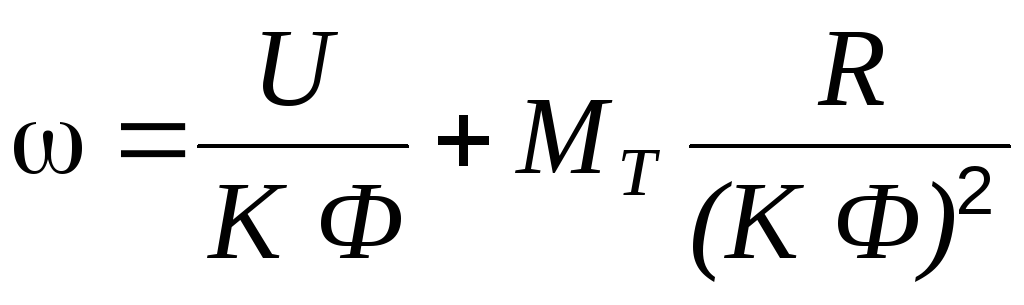
1. Торможение с отдачей энергии в сеть, или рекуперативное торможение (генераторный режим работы параллельно с сетью) осуществляется в том случае, когда скорость двигателя оказывается выше скорости идеального холостого хода и его эдс Е больше приложенного напряжения U. Двигатель здесь работает в режиме генератора параллельно с сетью, которой он отдает электрическую энергию; ток при этом изменяет свое направление, следовательно, изменяет знак и момент двигателя, т. е. он становится тормозным: М = – Ia Ф. Если обозначить тормозной момент через МТ = –М, то уравнение (4.5) при ω > ω0 примет следующий вид:
 . (4.8)
. (4.8)
Как видно из выражения (4.8), жесткость (наклон) механической характеристики в рассматриваемом генераторном режиме будет такой же, как и в двигательном. Поэтому графически механические характеристики двигателя в режиме торможения с отдачей энергии в сеть являются продолжением характеристик двигательного режима в область квадранта II (рис. 4.3). Этот способ торможения возможен, например, в приводах транспортных и подъемных механизмов при спуске груза и при некоторых способах регулирования скорости, когда двигатель, переходя к низшим скоростям, проходит значения ω>ω0. Такое торможение является весьма экономичным, поскольку оно сопровождается отдачей в сеть электрической энергии.
2. Динамическое торможение происходит при отключении якоря двигателя от сети и замыкании его на резистор (рис. 4.4), поэтому иногда его называют реостатным торможением. Обмотка возбуждения при этом должна оставаться присоединенной к сети.
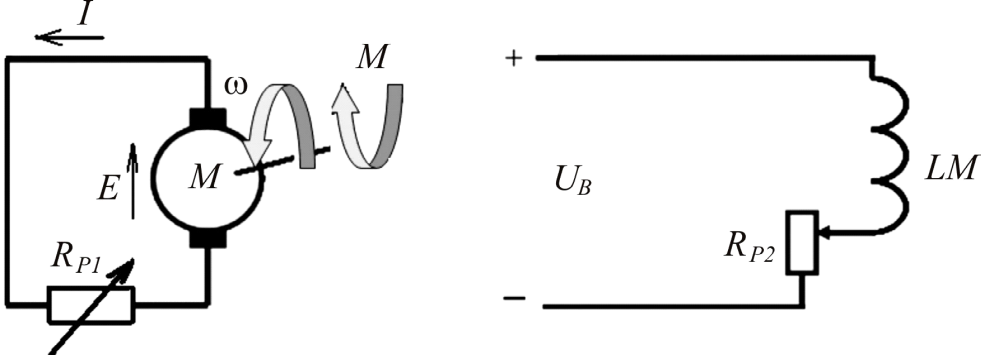
Рис. 4.4. Схема включения двигателя постоянного тока независимого возбуждения при динамическом торможении.
При динамическом торможении, так же, как и в предыдущем случае, механическая энергия, поступающая с вала, преобразуется в электрическую. Однако эта энергия не отдается в сеть, а выделяется в виде теплоты в сопротивлениях цепи якоря.
Так как при динамическом торможении якорные цепи машины отключены от сети, то в выражении (4.5) следует приравнять нулю напряжение U, тогда уравнение примет вид:
 . (4.9)
. (4.9)
При динамическом торможении механическая характеристика двигателя, как это видно из (4.9), представляет собой прямую, проходящую через начало координат. Семейство характеристик динамического торможения при различных сопротивлениях R якорной цепи показано ранее (см. рис. 4.3 квадрант II). Как видно из этого рисунка, жесткость характеристик уменьшается с увеличением сопротивления якорной цепи.
Динамическое торможение широко используется для останова привода при отключениях его от сети (особенно при реактивном характере момента), например при спуске грузов в подъемных механизмах. Оно достаточно экономично, хотя и уступает в этом отношении торможению с отдачей энергии в сеть.
3. Торможение противовключением (генераторный режим работы последовательно с сетью) осуществляется в том случае, когда обмотки двигателя включены для одного направления вращения, а якорь двигателя под воздействием внешнего момента или сил инерции вращается в противоположную сторону. Это может происходить, например, в приводе подъемника, когда двигатель включен на подъем, а момент, развиваемый грузом, заставляет привод вращаться в сторону спуска груза. Такой же режим получается и при переключении обмотки якоря (или обмотки возбуждения) двигателя для быстрой остановки или для изменения направления вращения на противоположное.
Графическое изображение механической характеристики для торможения противовключением, когда имеет место, например, так называемый тормозной спуск груза, приведено на рис. 4.3, из которого следует, что механическая характеристика при торможении противовключением является продолжением характеристики двигательного режима в квадрант IV.[5]







