- Драйвер биполярных шаговых двигателей
- Домашний CNC. Часть 1. Драйвер шагового двигателя для мини-станка с ЧПУ
- Содержание / Contents
- ↑ Привод
- ↑ Двигатель (мотор)
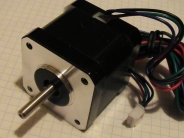
- ↑ Выбираем шаговый двигатель
- ↑ Драйвер шагового двигателя
- ↑ Богатство выбора
- ↑ Драйвер ШД на микросхеме Allegro A3982
- ↑ Драйвер ШД на микросхеме Allegro A3977
- ↑ Схема и прототип
- ↑ Печатная плата
- ↑ Работа
- ↑ Файлы
- Камрад, рассмотри датагорские рекомендации
- 🌻 Купон до 1000₽ для новичка на Aliexpress
- 🌼 Полезные и проверенные железяки, можно брать
- Драйвер шагового двигателя своими руками
- Как крутить шаговый двигатель
- USB контроллер шаговых двигателей и USB драйвер шагового двигателя
- Драйвер шагового двигателя с USB управлением своими руками
- Драйвер шагового двигателя USB на микроконтроллере AVR своими руками
Драйвер биполярных шаговых двигателей
Ниже представлена принципиальная схема драйвера биполярных шаговых двигателей с двумя L298 (усиленный) 48В, 4А.
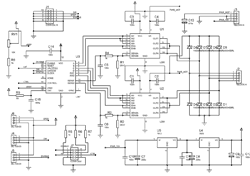
Данный драйвер может использоваться для управления практически любых 2-фазных биполярных гибридных шаговиков с 4 выводами и может обеспечить ток работы до 4 ампер при максимальном напряжении 35В.
Драйвер поддерживает режимы работы full step и half step которые можно выбрать с помощю джапмпера H/F. Джампер CTRL предназначен для установки типа двигателя униполярный/биполярный, в позиции биполярного ШИМ работает на выходы INHIBIT в противном случае на выходы ABCD. Питание драйвера 12-35В для двигателя и 15-24В для схемы, диоды D1-D8 быстрые на 3 ампера, желательно Шоттки. Цепочкой R9 и C15 можно подбирать частоту ШИМ, при указанных номиналах она выше диапазона слышимых звуков, так что движок не жужжит. Потенциометром RV1 устанавливается рабочий ток двигателя.
Если будете гонять на максимальной мощности , то нужно обязательно посадить его на хороший радиатор и поставить кулер, также не забудьте намазать термопастой.
Схема и плата нарисованы в программе Proteus 7.7.
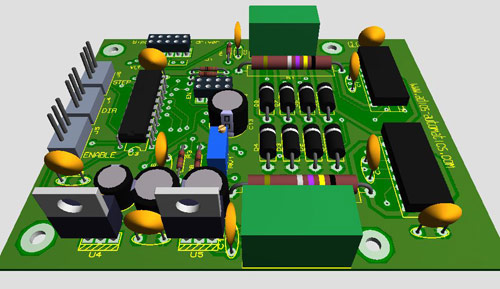
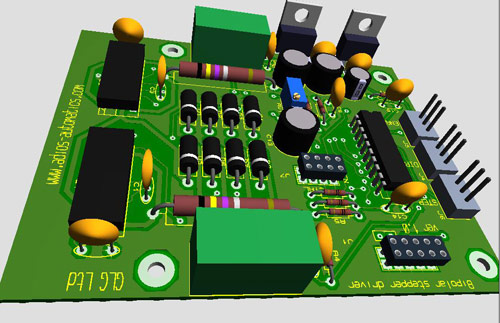
Схема протестированна и показала полную работоспособность драйвера


Используемые радиоэлементы:
Домашний CNC. Часть 1. Драйвер шагового двигателя для мини-станка с ЧПУ

Содержание / Contents
Сразу оговорюсь — все, что здесь далее написано, лишь мои личные выводы и не претендует на абсолютную истину. Истина рождается в споре, так что если уважаемые читатели в чем-то со мной не согласны, давайте это обсудим!
Задача построения станка обычно сводится к трем подзадачам — механика, электроника, программное обеспечение. Видимо и статьи придется писать тоже три.
Поскольку у нас журнал всё-таки практической электроники, начну с электроники и чуть-чуть с механики!
↑ Привод
Нужно двигать собственно фрезер в 3-х направлениях — XYZ, значит нужно 3 привода — 3 мотора с передачей вращения вала двигателя в линейное перемещение.
О передаче…
Для фрезерного станка, где есть боковые усилия резания материала, желательно не применять ременные передачи, очень популярные в 3D принтерах. Буду применять передачу «винт-гайка». Самая бюджетная передача — обычный стальной винт и безлюфтовая, желательно бронзовая, гайка. Более правильная — винт с трапециевидной резьбой и гайка из капролона. Самая хорошая (и, увы, самая дорогая) шарико-винтовая пара, или ШВП. Об этом подробнее я еще расскажу далее…
У каждой передачи есть свой коэффициент, свой шаг — то есть насколько линейно по оси переместится фрезер за один оборот двигателя, например, на 4 мм.
↑ Двигатель (мотор)
В качестве двигателя для привода определил шаговый двигатель (ШД)
Почему шаговый? Что это вообще такое?
Двигатели есть переменного и постоянного тока, коллекторные и бесколлекторные, и так называемые «шаговые». В любом случае нам надо обеспечить какую-то точность позиционирования, например 0,01 мм. Как это сделать? Если двигатель имеет прямой привод — вал двигателя соединяют напрямую с винтом, то для обеспечения такой точности нужно повернуть его на некоторый угол. В данном случае, при шаге передачи 4 мм и желаемой точности перемещения 0,01 мм это… всего 1/400 оборота, или 360/400=0,9 градуса! Ерунда, возьмем обычный моторчик…
С «обычным» моторчиком без обратной связи никак не получится. Не вдаваясь в подробности, схема управления двигателем должна «знать», на какой угол повернулась ось. Можно конечно поставить редуктор — потеряем в скорости, и все равно без гарантии, без обратной связи вообще никак! На ось ставится датчик угла поворота. Такое решение надежное, но дорогое.
Альтернатива — шаговый двигатель (как он работает, почитайте сами). Можно считать, что за одну «команду» он повернет свою ось на определенный градус, обычно это 1,8 или 0,9 градуса (точность обычно не хуже 5%) — как раз то, что нужно. Недостаток такого решения — при большой нагрузке двигатель будет пропускать команды — «шаги» и может вообще остановиться. Вопрос решается установкой заведомо мощного двигателя. На шаговых двигателях и делается большинство любительских станочков.
↑ Выбираем шаговый двигатель
2 обмотки, с минимальным током, минимальной индуктивностью и максимальным моментом — то есть максимально мощный и экономичный двигатель.
Противоречивые требования. Малый ток — значит большое сопротивление, значит много витков провода обмотки двигателя, значит большая индуктивность. А большой момент — это большой ток и много витков. Выбираем в пользу большего тока и меньшей индуктивности. А момент надо выбирать исходя из нагрузки, но об этом потом.
Характеристики некоторых двигателей приведены в таблице:

Для небольшого станка с рабочим пространством размером 300×300х100 мм и легким фрезером вполне сгодятся двигатели с крутящим моментом 0,3Нм и выше. Оптимальным является ток от 1,5 до 2,5 Ампер , вполне подойдет FL42STH38-1684
↑ Драйвер шагового двигателя
Двигатель есть. Теперь нужен драйвер — переключать напряжение на обмотках двигателя определенным образом, при этом не превышая установленный ток.
Самое простое решение — источник заданного тока и две пары транзисторных ключей на каждую обмотку. И четыре защитных диода. И логическая схема чтобы менять направление. И… Такое решение обычно делают на микросхеме ULN2003A для двигателей с малым током, имеет много недостатков, не буду на них останавливаться.
Альтернатива — специализированные микросхемы «всё в одном» — с логикой, транзисторами и диодами защиты внутри (или снаружи). А еще такие микросхемы контролируют ток обмоток и регулируют его с помощью ШИМ-а, а так же могут реализовывать режим «полушаг», а некоторые режимы 1/4 шага, и 1/8 шага и т. д. Эти режимы позволяют повысить точность позиционирования, повысить плавность движения и снизить резонанс. Обычно достаточно режима «полушаг», что позволит повысить теоретическую точность линейного позиционирования (в моем примере до 0,005 мм).
Что внутри микросхемы драйвера шагового двигателя? Блок логики и управления, источники питания, ШИМ со схемами формирования момента и времени коммутации обмоток, выходные ключи на полевых транзисторах, компараторы обратной связи — ток контролируется по падению напряжения на резисторах (Rs) в цепи питания обмоток. Ток двигателя задается опорным напряжением.
Для реализации этих функций существуют и другие схемные решения, например, с использованием микроконтроллеров PIC или ATMEGA (опять же с внешними транзисторами и защитными диодами). На мой взгляд, они не обладают значительным преимуществом перед «готовыми» микросхемами и я их в данном проекте использовать не буду.
↑ Богатство выбора

Из готовых — наиболее распространённые и недорогие драйверы на микросхемах Allegro A4988 (до 2А), Texas Instruments DRV8825 (до 2,5А).
Поскольку модули изначально разрабатывались для использования в 3D принтерах типа Rep-rap проекта Arduino, они не являются законченными модулями (например, им нужно еще питание логики (+5V), которое подается с так называемой рампы (Ramp).
Еще есть решения на DRV8811 (до 1,9 А), A3982 (до 2 А), A3977 (до 2,5 А), DRV8818 (до 2,5 А) DRV8825 (до 2,5 А), Toshiba TB6560 (до 3 А) и другие.
Поскольку мне интересно что-то сделать самому, плюс появилась возможность «попробовать на вкус» микросхемы Allegro A3982 и A3977, решил сделать пару драйверов самостоятельно.
Готовые решения на A4988 не понравились, прежде всего, из-за миниатюризации размеров печатной платы в ущерб хорошему охлаждению. Типовое сопротивление открытых транзисторов у A4388 при токе 1,5А 0,32+0,43 Ом, плюс 0,1-0,22 Ома «измерительный» резистор — получается около 0,85 Ом. А таких каналов два, и хотя и работают они импульсно, но 2-3 Ватта тепла надо рассеивать. Ну не верю я в многослойную плату и малюсенький радиатор охлаждения — в даташите нарисована плата гораздо больших размеров.
Провода мотора нужно сделать короткими, драйвер устанавливать рядом с двигателем. Существует 2 технических решения в звукотехнике: длинный сигнальный кабель к усилителю + короткие провода к акустической системе, или короткий сигнальный кабель к усилителю + длинные провода, а акустической системе. Оба решения имеют свои плюсы и минусы. С моторами — так же. Я выбрал длинные провода управления и короткие провода к мотору.
Управляющие сигналы — «шаг» (step), «направление» (dir), «включение» (enable), индикация состояния сигналов управления. Некоторые схемы не используют сигнал «Enable», но это приводит в режиме простоя к ненужному нагреву и микросхемы и двигателя.
Одно питание 12-24 вольта, источник питания логики (+5B) — на плате. Размеры платы — достаточные для хорошего охлаждения, двухсторонняя печать с большой областью «меди», возможность приклеить на микросхему радиатор (применяемой для охлаждения памяти видеокарт).
↑ Драйвер ШД на микросхеме Allegro A3982

Напряжение питание силовое: 8…35 В Напряжение питание логики: 3,3…5 В Выходной ток (максимальный, зависит от режима и охлаждения): ±2 А Типовое сопротивление открытых транзисторов (при токе 1,5А): 0,33+0,37 Ом
↑ Драйвер ШД на микросхеме Allegro A3977

Напряжение питание силовое: 8…35 В Напряжение питание логики: 3,3…5 В Выходной ток (максимальный, зависит от режима и охлаждения): ±2,5 А Типовое сопротивление открытых транзисторов (при токе 2,5А): 0,33+0,45 Ом
↑ Схема и прототип


Проектировал в среде DipTrace. Драйвер A3982 включен по схеме из документации производителя. Включен режим «полушаг». Дополнительно для надежной работы сигналов управления и индикации применил микросхему логики 74НС14 (с триггерами Шмитта). Можно было сделать гальвано-развязку на оптронах, но для маленького станка я решил ее не делать. Схема на A3977 отличается только дополнительными джамперами режима шага и более мощным разъемом питания, пока в «железе» не реализована.
↑ Печатная плата


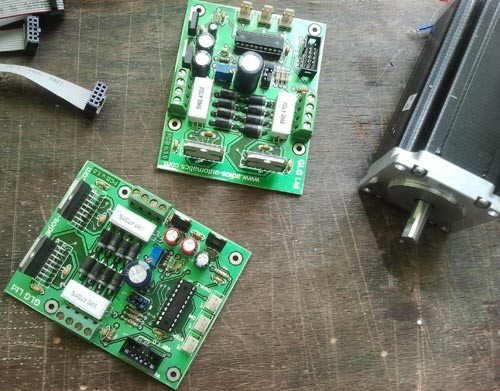
↑ Работа

Температуру корпуса микросхемы мерил пирометром — без радиатора она достигала 90-95 градусов (при токе обмоток 1,6А) — мне это не понравилось. С радиатором — 55-60 градусов — куда лучше! Вообще плата вся теплая — около 35 градусов.
Спасибо за внимание!
Продолжение следует…
↑ Файлы
В архиве схема и плата в формате DipTrace
▼ Файловый сервис недоступен. Зарегистрируйтесь или авторизуйтесь на сайте.
Даташит на микросхему Allegro A3982
▼ Файловый сервис недоступен. Зарегистрируйтесь или авторизуйтесь на сайте.
Камрад, рассмотри датагорские рекомендации
🌻 Купон до 1000₽ для новичка на Aliexpress
Никогда не затаривался у китайцев? Пришло время начать!
Камрад, регистрируйся на Али по нашей ссылке. Ты получишь скидочный купон на первый заказ. Не тяни, условия акции меняются.
🌼 Полезные и проверенные железяки, можно брать
Куплено и опробовано читателями или в лаборатории редакции.
Драйвер шагового двигателя своими руками
Шаговый двигатель используется в машинах для точного перемещения. Наладим управление шаговым двигателем через USB с компьютера своими руками. Нам потребуется:
1) Шаговый двигатель, возьмем — Nema23 76 мм, вместо него может быть другой, управлять будем биполяным методом, любой гибридный и биполярный шаговый двигатель будет работать с таким же управлением.
2) Блок питания, возьмем — импульсный блок питания мощностью 360W с выходным напряжением 24V / 15A, может использоваться любой другой блок питания, если будет достаточно мощности и напряжения для работы двигателя. Более мощному двигателю будет нужно больше напряжения. Предел напряжения нашего драйвера ограничивается максимальным напряжением, которое выдерживают транзисторы, это 100V, у нас блок питания на 24V. В случае большего напряжения транзисторы в схеме необходимо заменить на более мощные, также при увеличении напряжения, транзисторы могут начать греться, если такое случилось, необходимо дополнительно обдувать их куллером (у меня все в порядке и куллер не требуется). Для подключения блока питания к сети 220V также нужен шнур и нужно определить где в вашей розетке ноль, а где фаза. Контакт блока N подключается к нулю, а L к фазе, также можно подключить заземление (но не обязательно). Определение возможно при помощи индикаторной отвертки, у меня определилось, что слева ноль, а справа фаза.



Как крутить шаговый двигатель
Шаговый двигатель работает от подачи комбинаций напряжения в разных направлениях на его обмотки, у этого шагового двигателя 2 обмотки — 4 провода, первая обмотка — черный (A) и зеленый (A*) провод, вторая обмотка — красный (B) и синий (B*). За одну смену комбинаций делается 1 шаг — 1,8 градусов. Если комбинации быстро менять, то двигатель будет быстро и точно позиционироваться — крутиться. Смена комбинаций возможна в двух направлениях, соответственно двигатель будет крутиться вперед или назад.
Чтобы крутить шаговый двигатель, надо:
1) Собрать устройство — USB контроллер шагового двигателя на микроконтроллере AVR и драйвер шагового двигателя, 2 в 1. Перед тем как собирать это сложное устройство, рекомендую сначало отдельно собрать и проверить работу только USB контроллера, его я уже собрал вот тут — контроллер USB. Если USB связь работает нормально, то можно приступать к изготовлению драйвера.
2) Написать программу для компьютера, которая будет посылать USB команды устройству.
3) Написать программу для микроконтроллера AVR, которая будет принимать USB команды и крутить двигатель.
USB контроллер шаговых двигателей и USB драйвер шагового двигателя
Взятый нами двигатель является гибридным и поддерживает несколько вариантов управления. Управлять двигателем будем биполярным методом и соответственно собираем мы драйвер биполярного шагового двигателя с USB контроллером. Сначало покажу готовый результат, а потом подробно рассмотрим его. Вот фото собранного драйвера шагового двигателя с USB управлением, который я собрал:
Драйвер шагового двигателя с USB управлением своими руками

На картинке сверху — биполярный (гибридный) шаговый двигатель NEMA 23 с потреблением — 3А тока на обмотку. Под ним — импульсный блок питания 360 Вт, 24 В, 15 А. Мощности блока хватает на 15 / 3 = 5 одновременно запитанных обмоток, у одного двигателя 2 обмотки, т.е хватит на 2 одновременно работающих двигателя (4 обмотки). Я не вижу необходимости включать одновременно больше одного двигателя, в случае если необходимо двигаться по кривой траектории, то нужно чередовать короткие включения то одного, то другого двигателя. Так что имеющейся мощности с запасом хватает. Двигатель и блок питания подключены к устройству, которое также подключено через USB к компьютеру. Все соединено по схеме.
Схема драйвера биполярного шагового двигателя и USB контроллера (схема длинная и нуждается в прокрутке для просмотра):
Драйвер шагового двигателя USB на микроконтроллере AVR своими руками

Электронные компоненты, которые надо купить для сборки устройства по схеме:








Дополнительно нужно (нет в наличии):
1) Модуль питания DC-DC SMAU01L-12 (вместо него пойдет любой конвертер DC-DC с 5V до 10V-15V) — 1 шт., возможно можно без него, от 5V питать (не проверено)
Главным компонентом схемы является программируемый микроконтроллер AVR — ATmega16A, если вы не знаете как с ними работать (записывать программу), сначало ознакомьтесь с основами такой работы, которые подробно описаны в первой статье
управление машиной. Для устройства можно использовать и другой микроконтроллер AVR, я выбрал ATmega16A, т.к. в нем с запасом имеется много памяти и контактов для подключения нескольких двигателей и большого количества рабочих инструментов.
Слева от ATmega16A находятся компоненты для организации связи по протоколу USB — к выводам XTAL подключен внешний кварцевый резонатор с USB-совместимой частотой 12 МГц. Для сглаживания сигнала у него есть 2 конденсатора по 20 пФ, все это соединяется с минусом питания. К контактам, через которые идет обмен сообщениями с USB, подключены 2 резистора по 68 Ом, как того требует протокол USB. Резистор на 1.5 кОм, подключенный к D- линии задает низкоскоростной режим работы USB устройства. Диоды Зенера 3V6 понижают напряжение на линиях, через которые идет обмен данными USB с 5 до 3.6V.
Управление двигателем подключается к контактам PB0, PB1, PB2, PB3, на остальные свободные P-контакты можно в будующем подключить еще двигатели и рабочие инструменты, но пока они пустуют. Микроконтроллер ATmega16 отдает команды и обрабатывает USB сигналы после того как в него записана программа (ниже она будет написана). После него идет конструкция из микросхем IR2102 и транзисторов IRF540N (2 так называемых H-моста) — она приводит шаговый двигатель в движение.
Драйвер IR2101 нужен для преодаления большой емкости затвора транзистора IRF540N, что позволяет открывать и закрыть транзистор с большой скоростью (например принимать сигнал ШИМ, которым может регулироваться скорость двигателя при необходимости — об этом сигнале дальше напишу), что нам и нужно. К сожалению для питания этого драйвера необходимо 10-15V, у нас есть только 5V от USB. Поэтому пришлось поставить компонент DC-DC SMAU01L-12, который преобразует 5V в 12V, вместо него можно использовать любой другой способ получения такого напряжения, например, при помощи трансформатора или любым другим путем. К VCC подключается +12V, к COM -12V. Один драйвер работает с 2мя транзисторами — верхним (H) и нижним (L). Контакты HIN и LIN — входной сигнал с микроконтроллера для верхнего и нижнего транзистора, по этому сигналу транзисторы открываются и закрываются. HO и LO — это выходные сигналы, транзисторы подключаются гейтами (G) к этим контактам. Они подключаются не просто так — справа на линиях 2 резистора 10/100 Ом и диод, они нужны для нормальной работы транзисторов — чтобы они замедлялись при открытии и не замедлялись при закрытии, эти транзисторы слишком быстро открываются и это может вызвать проблемы. Диод и конденсаторы 3300 пФ — нужны для работы драйвера IR2101 согласно документации на эту микросхему.
Каждая обмотка (фаза) двигателя (у двигателя 2 обмотки A и B — 4 контакта) подключается к H-мосту из транзисторов IRF540N. H-мост — это специальная схема соединения транзисторов, которая позволяет подавать через них напряжение высокого уровня (24V) в разных направлениях. Один мост изготавливается из 4-х транзисторов. В итоге здесь вы видите 2 H-моста, которые позволяют гонять разнонаправленное напряжение высокого уровня по 2м обмоткам двигателя и тем самым крутить его.
Обратите внимание, что в мосту — HIN верхнего драйвера соединяется с LIN нижнего драйвера, а LIN верхнего с HIN нижнего. Это сделано для одновременной подачи сигналов. Если вы включили HIN сверху, то обязаны включить LIN с низу, иначе произойдет короткое замыкание. Такое подключение позволяет автоматом включать пару. Впрочем короткое замыкание все же возможно, если вы откроете и HIN и LIN на одном мосте, поэтому не допускайте этого. На контактах PB0 — PB3 допустимы только значения 0000, 1010, 0110, 0101, 1001. Их перебор крутит двигатель. Подача других значений скорей всего приведет к короткому замыканию моста.
Мощные резисторы с низким номиналом 0.1 Ом и высокой мощностью (3-5 Вт) нужны для защиты от высокого тока — это шунты. Если что их можно снять и заменить простым соединением с минусом питания, если например не будет хватать мощности. Для слабых резисторов мощность берется от тока USB: 0.05 А * 5 V = 0.25 Вт (ток USB задается программно, по умолчанию в нашей программе стоит 0.05). Черная полоска на диодах соответствует вертикальной линии на схеме.
Шаговый двигатель и блок питания подключаются к H-мостам, как показано на схеме. Минусы питания 24V, 12V и 5V соединяются. Между плюсом и минусом 24V линии ставится сглаживающий пленочный конденсатор.
Отдельное крупное фото драйвера шагового двигателя:







