- Ардуино: драйвер L298N для мотора постоянного тока
- Назначение элементов и контактов на плате драйвера L298N
- Подключение драйвера L298N к Ардуино Уно
- Программа для драйвера мотора L298N
- Заключение
- Обзор драйвера мотора на L298N
- Технические параметры
- Общие сведения
- Подключение L298N к Arduino (коллекторный двигатель)
- Управление двигателем постоянного тока с применением драйвера L298N и Arduino UNO
- Введение
- Управление двигателем при помощи Arduino и сгенерированным сигналом ШИМ
- Управление двигателем постоянного тока с использованием Н-моста
- Что представляет собой драйвер L298N?
- Принцип управления двигателем при помощи Arduino и драйвера L298N
- Простой пример работы Arduino с драйвером L298N
Ардуино: драйвер L298N для мотора постоянного тока
Чтобы управлять вращением мотора, любому контроллеру необходимо специальное устройство, которое часто называют драйвером (от англ. driver — водитель). В уроке «управление двигателем постоянного тока» мы уже пробовали запускать и вращать в разные стороны мотор двумя способами: с помощью одного транзистора и с помощью микросхемы драйвера L293D.
На этот раз, попробуем использовать более мощный двухканальный драйвер L298N, который часто можно встретить в виде модуля красного цвета (хотя встречаются зеленые и синие модели).

Как и в случае L293N, драйвер представляет собой полный H-мост, главная функция которого — менять полярность на нагрузке. А если в качестве нагрузки будет мотор постоянного тока, то смена полярности приведет к смене направления его вращения. Это то, что нам нужно.
Спецификация модуля L298N:
- напряжение питания двигателей: до 35 В;
- рабочий ток (на каждый канал): 2 А;
- периодический ток (80% — вкл, 20% — выкл): 2,5 А;
- кратковременный ток: 3 А;
- вес: 33 г.
Драйвер L298N работает с более высоким током, чем L293D. С помощью L298N мы можем управлять и слабыми моторчиками типа n20 и мощными моторами, такими как JGA25 или даже JGA37 с крутящим моментом до 20-25 кг/см. Хватит для большинства DIY проектов!
Назначение элементов и контактов на плате драйвера L298N
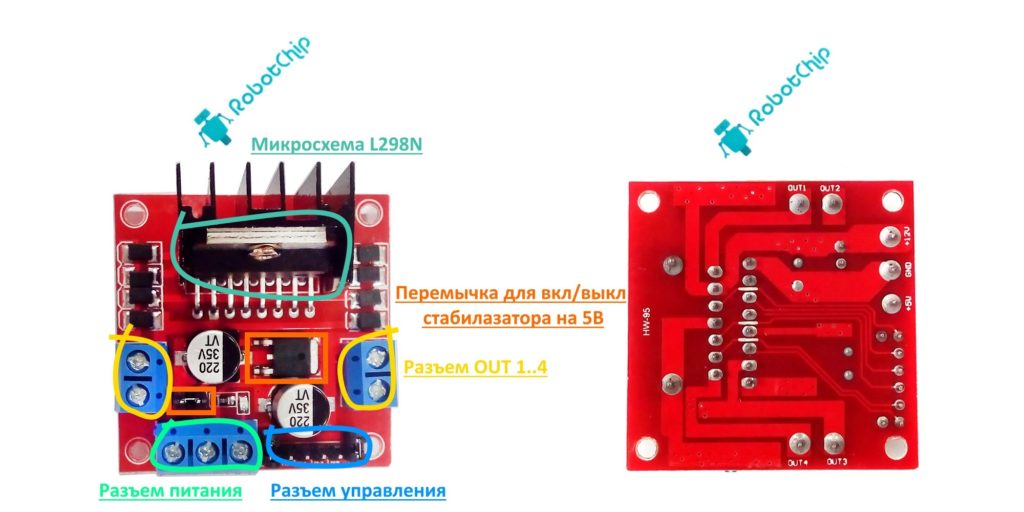
Посмотрим внимательнее на модуль и разберемся с его контактами.

Логика микросхемы L298N питается напряжением 5 Вольт. Для этого на модуле предусмотрен стабилизатор напряжения 78M05. На вход этого стабилизатора можно подавать напряжение до 35 В, а на выходе всегда получается 5 В. Рабочий ток у 78M05 небольшой — до 500 мА. Однако, при желании, от него можно питать и саму плату Ардуино Уно, к которой мы будем подключать драйвер.
Тройная клемма снизу отвечает за питание модуля. Самый левый контакт — питание моторов. Сюда можно подавать до 35 В. Средний контакт — земля, которая должна быть общей для модуля и контроллера. Правый контакт имеет двоякую функцию. Если на модуле стоит перемычка питания стабилизатора, то на этом контакте будет +5В и к нему можно ничего не подключать, либо питать от него контроллер. Но если перемычку убрать, то к этому контакту нужно будет непременно подключить +5В от контроллера, чтобы питать драйвер. В нашем примере мы будем ориентироваться именно на вариант без перемычки.
Две другие винтовые клеммы (OUT1/2 и OUT 3/4) служат для подключения моторов. Надо отметить, что моторы постоянного тока неполярные, но от того на какой контакт мотора подается плюс, а на какой минус, зависит направление их вращения.
Наконец, осталось разобраться с контактами управления. Их по три штуки на каждый мотор. Контакты ENA и ENB позволяют управлять моторами с помощью ШИМ сигнала. Если ENA и ENB подключить строго к +5 В, то моторы будут всегда вращаться с максимальной возможной скоростью. Именно для этого режима на модуле предусмотрены две перемычки рядом с ENA и ENB.
С помощью контактов IN1,IN2,IN3,IN4 задаётся режим работы моторов. Таблица режимов для двигателя A имеет вид:
| Режим | IN1 | IN2 |
| Вращение в одну сторону | 1 | 0 |
| Вращение в обратную сторону | 0 | 1 |
| Блокировка мотора | 1 | 1 |
| Отключение мотора | 0 | 0 |
Тут следует пояснить последние два режима. Если нам необходимо резко остановить мотор, то выбираем режим блокировки. Для плавной остановки — выбираем «отключение мотора»
Подключение драйвера L298N к Ардуино Уно
Чтобы попробовать драйвер в деле, подключим его к контроллеру Ардуино Уно и к любому, попавшему под руку, небольшому мотору постоянного тока. В данном уроке мы используем самый простой мотор с напряжением питания 1,5-3 Вольта. Для питания этого мотора нам будет достаточно двух пальчиковых батареек. В такой схеме просто невозможно запитать микросхему драйвера от встроенного стабилизатора, поэтому питание +5В будем брать от Ардуино.
Также отметим, что при данной схеме подключения с внешним питанием +5 В, нам нужно убрать соответствующую перемычку, о которой мы говорили выше (перемычка питания от стабилизатора)!
Ну и раз уж мы планируем управлять скоростью вращения, уберем перемычку с контакта ENA.
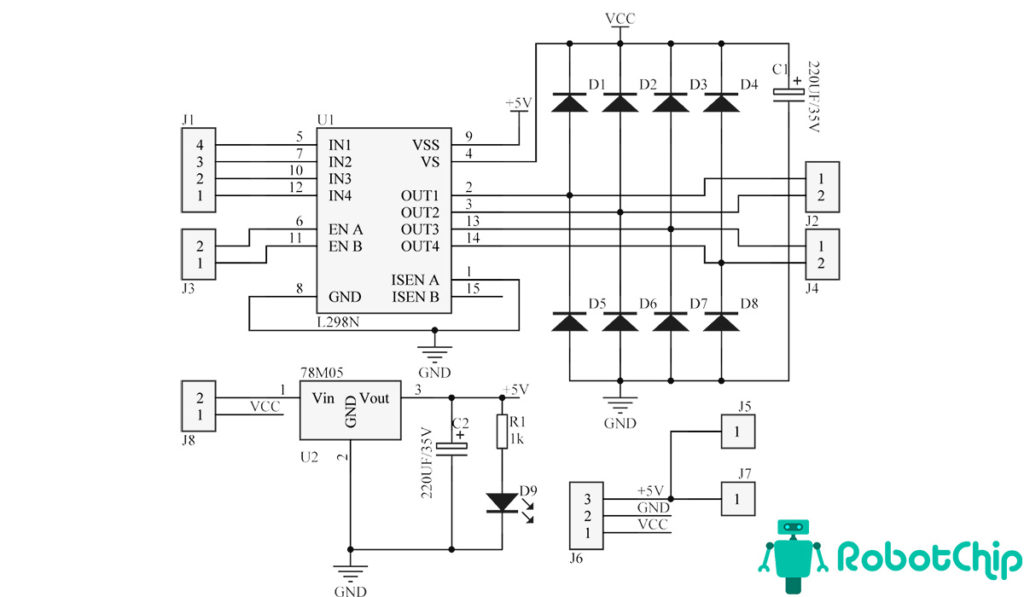
Принципиальная схема

Внешний вид макета

Программа для драйвера мотора L298N
Напишем простую программу, которая будет вращать мотор в одну сторону 3 секунды с максимальной скоростью, и затем 3 секунды в обратную сторону с более медленной скоростью.
Загружаем программу на Ардуино, затем подключаем к драйверу элементы питания и смотрим как ведёт себя моторчик.
Следует отметить, что данная программа не гарантирует вращение мотора с какой-то конкретной скоростью. Мы лишь можем менять мощность, передаваемую на мотор, с помощью изменения коэффициента заполнения ШИМ сигнала (duty cycle). Подробнее о ШИМ сигнале можно узнать в одном из наших уроков.
Заключение
Итак, модуль драйвера L298N оказался не таким сложным, как могло показаться. Все драйверы имеют практически схожие контакты управления: EN,IN1,IN2. Бывает, что отдельный вход EN отсутствует, и тогда ШИМ сигнал подается на IN1,IN2. Разобравшись с одним драйвером, мы можем с легкостью применять в своих проектах и другие модели.
Как уже было написано, L298N является достаточно мощным чтобы потянуть большинство моторов, применяемых в DIY проектах. Это и популярные пластиковые желтые моторы с редуктором и более мощные металлические JGA25 и JGA37.
Отдельно следует отметить и ещё одно распространенное применение L298N. С помощью этого драйвера можно управлять биполярными шаговыми двигателями, хотя и не настолько эффективно, как это делают специализированные драйвера типа A4988.
Обзор драйвера мотора на L298N
Автор: Сергей · Опубликовано 20.12.2018 · Обновлено 13.04.2020

Одним из самых простых и недорогх способов управления двигателями постоянного тока является модуль L298N Motor Driver с Arduino. Он может контролировать скорость и направление вращения двух двигателей постоянного тока, а так же управлять биполярным шаговым двигателем (типа NEMA 17).
Технические параметры
► Напряжение питания логики модуля: 5 В
► Потребляемый ток встроенной логики: 36 мА
► Напряжение питания драйвера: 5 В – 35 В
► Рабочий ток драйвера: 2 А (пиковый ток 3 А)
► Габариты: 43.5 мм х 43.2мм х 29.4мм
Общие сведения
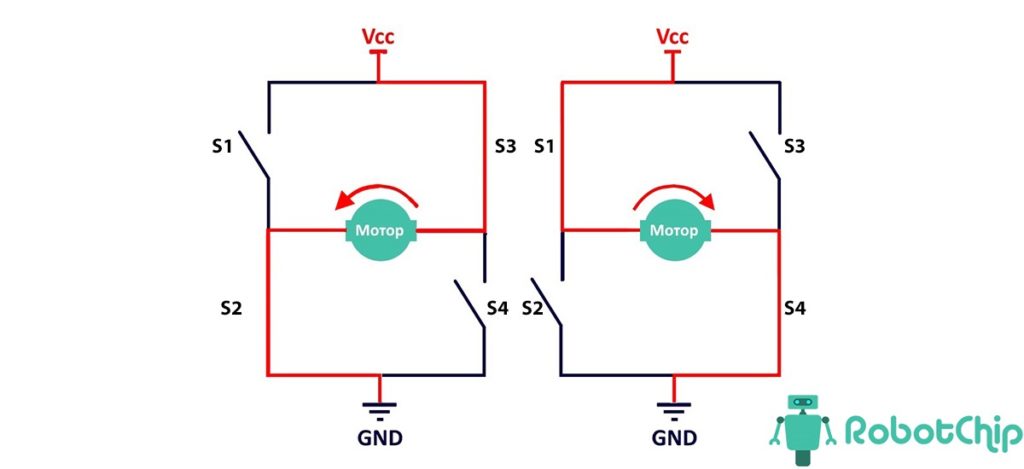
Основной чип модуля это микросхема L298N, состоящая из двух H-мост (H-Bridge), один для выхода A, второй для выхода B. H-мост широко используется в электронике и служит для изменения вращения двигателем, схема H-моста содержит четыре транзистора (ключа) с двигателем в центре, образуя H-подобную компоновку. Принцип работы прост, при одновременном закрытие двух отдельных транзистора изменяется полярность напряжения, приложенного к двигателю. Это позволяет изменять направление вращения двигателя. На рисунке ниже, показана работа H-мостовой схемы.
Для управления скоростью двигателя постоянного тока используется метод PWM (Широтно-импульсной модуляции).
Модуль L298N содержит разъем для подключения питания, ряд перемычек для настройки модуля, два выхода A и B и разъем управления, которые регулируют скорость и направление вращения, назначение каждого можно ознакомится ниже:
► Вывод Vss — питание двигателей, от 5 до 35 В;
► Вывод GND — общий вывод заземления;
► Вывод Vs — питание для логической схемы;
► Перемычка ENA — используются для управления скоростью двигателя A;
► Вывода IN1 и IN2 — используются для управления направлением вращения двигателя A;
► Вывода IN3 и IN4 — используются для управления направлением вращения двигателя B;
► Перемычка ENB — используются для управления скоростью двигателя B;
► Выходы OUT1 и OUT2 — разъем для двигателя A;
► Выходы OUT3 и OUT4 — разъем для двигателя B;
Принципиальная схема модуля L298N
Питание модуля.
Питание модуля L298N осуществляется через трех контактный разъем, шагом 3,5 мм:
► Vs — источник питания двигателей, 3B — 35B
► GND — земля
► Vss — источник питания модуля, 4,5В — 5,5В
Фактически у модуля L298N, есть два контакта питания, а именно. «Vss» и «Vs». От «Vs» питаются двигатели с допустимым напряжением от 5 В до 35 В, а от «Vss» питается логическая схема модуля 4,5В до 5,5В. На плате установлен встроенный стабилизатор напряжения на 5 Вольт (78M05), его можно включить или отключить с помощью перемычки. Когда перемычка установлена, стабилизатор включен и питает логику модуля (Vss) от источника питания двигателя (Vs). При включенном стабилизаторе, вход «Vss» работает как выход и обеспечивает 5В с током 0,5 А. Когда перемычка убрана, стабилизатор отключен и необходимо отдельно подключить питание 5 Вольт на вход Vss.
Внимание! Нельзя установить перемычку, если напряжение двигателя ниже 12 Вольт.

Падение напряжения L298N
Падение напряжения драйвера L298N составляет около 2 В, это связано с внутренним падением напряжения в транзисторах в цепи H-мосте. Таким образом, если мы подключим 12 В к источнику питания двигателя, то двигатели получат напряжение около 10 В. Это означает, что двигатель на 12 В не будет работать с максимальной скоростью, для получения максимальной скорости, напряжение поданное на двигателя должен быть выше напряжения (2 В), чем потребность в фактическом напряжении двигателя. Учитывая падение напряжения на 2 В, если вы используете двигатели 5 В, вам необходимо обеспечить питание 7 В. Если у вас 12-ваттные двигатели, то напряжение питания вашего двигателя должно составлять 14 В.
Управления скоростью
Разъемы управления скоростью ENA и ENB используются для включения и выключения управления скоростью двигателей. Когда перемычка установлена, двигатель вращается с максимальной скоростью. Если необходимо управлять скоростью двигателей, необходимо убрать перемычку и подключить выводы к контактам с поддержкой PWM на Arduino.
Подключение L298N к Arduino (коллекторный двигатель)
Необходимые детали:
► Arduino UNO R3 x 1 шт.
► Драйвер мотора на L298N (5-35V, 2A) x 1 шт.
► Коллекторный двигатель x 2 шт.
► Комплект проводов DuPont 2.54 мм, 20 см x 1 шт.
Подключение:
Первым делом необходимо подключить источник питания 12B к двигателям, в примере используется распространенные двигатель постоянного тока, рассчитанные на 3B . . . 12B (применяемые в робототехнике). Учитывая внутреннее падение напряжения на микросхеме L298N, двигатели получат 10 В и будут вращаться не в полную силу.
Далее, нужно подключить 5 вольт на логическую схему L298N, для этого воспользуемся встроенным стабилизатором напряжения, который работает от источника питания двигателя, поэтому, перемычка EN должна быть установлена.
Теперь осталось подключить управляющие провода ENA, IN1, IN2, IN3, IN4 и ENB к шести цифровым выводам Arduino 9, 8, 7, 5, 4 и 3. Обратите внимание, что выводы Arduino 9 и 3 поддерживают ШИМ. Теперь, подключаем двигатели, один к клемме A (OUT1 & OUT2), а другой к клемме B (OUT3 & OUT4). Принципиальная схема подключения приведена ниже.
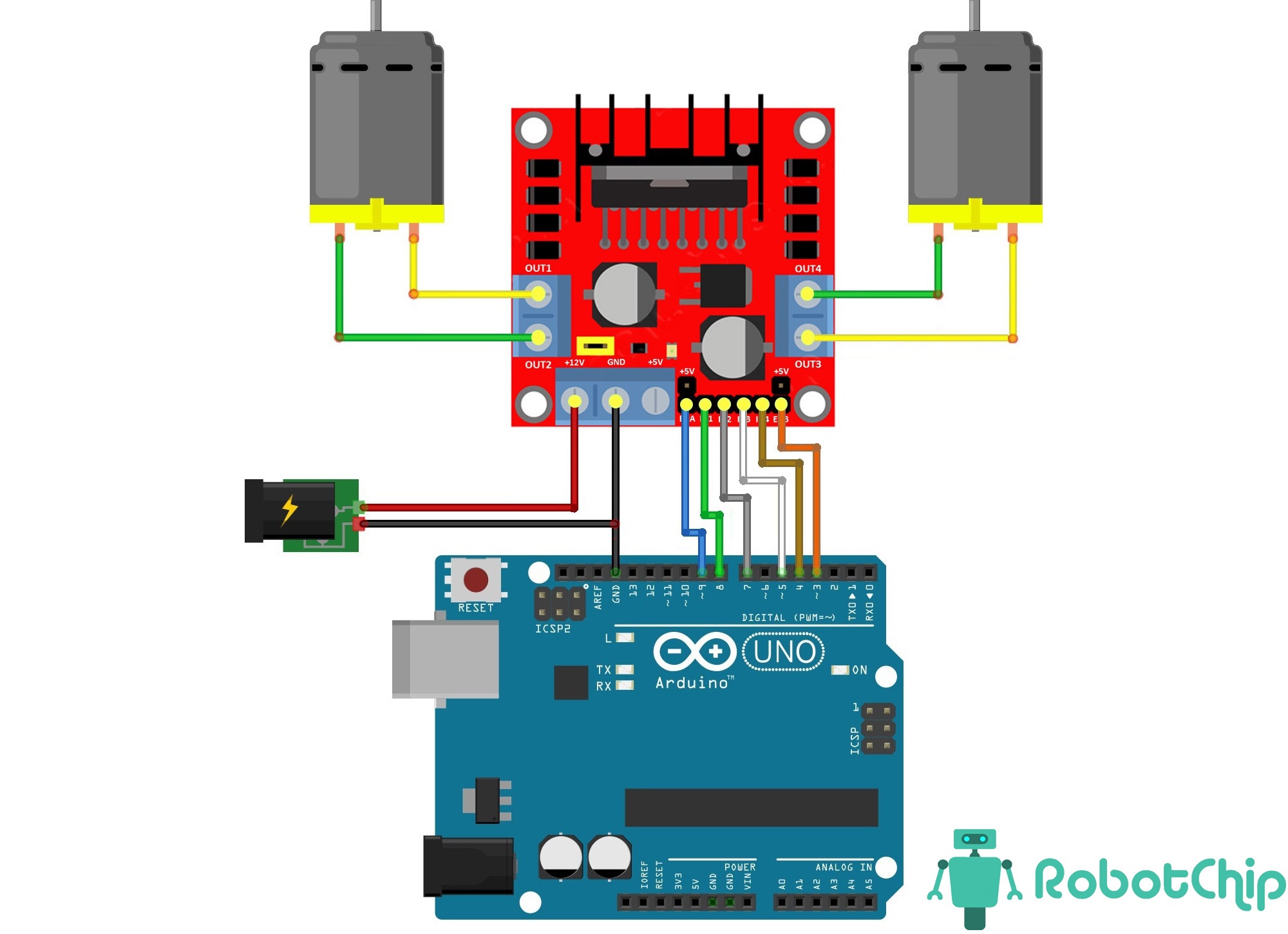
Осталось подключить Arduino к источнику питания и загрузить скетч.
Управление двигателем постоянного тока с применением драйвера L298N и Arduino UNO
В данном примере мы рассмотрим один из способов управления электродвигателем постоянного тока, который осуществляется посредством платы Arduino и драйвера L298N. Несмотря на большое многообразие вариантов управления работой электрических машин постоянного тока, куда большей популярностью пользуется именно эта схема. Так как с ее помощью можно осуществлять достаточно широкий спектр различных операций, в сравнении со схемами, использующими другие драйвера и микроконтроллеры.
Введение
Электрическая машина постоянного тока является одной из самых простых в эксплуатации, благодаря чему ее так часто применяют в устройствах радиоэлектроники и робототехники. Такая популярность обусловлена простотой питания и управления – для этого подаются два полюса от источника эдс (отрицательный и положительный), и при протекании тока по обмоткам происходит вращение вала. При смене полярности двигатель совершает реверсивное движение.
В системах радиоэлектроники такие способы управления работой двигателя получили название широтно-импульсной модуляции (ШИМ). Такой процесс характеризуется изменением продолжительности подаваемого напряжения или формы его сигнала.
Как можно изменять скорость вращения при помощи ШИМ?
Применяя способ ШИМ, вы производите попеременную подачу и отключение напряжения на обмотки двигателя с большой частотой. Частота импульсов при этом может достигать нескольких килогерц.
Величина среднего напряжения, подаваемого на двигатель, напрямую зависит от формы сигнала ШИМ . Форма сигнала, в свою очередь, определяется рабочим циклом, который можно представить в виде отношения времени подачи сигнала к общему периоду (сумме времени подачи напряжения и его отключения). В результате получается безразмерная величина, которую выражают в процентном отношении – сколько времени от общего периода напряжение подавалось на двигатель. В слаботочных системах на 5, 12, 24 или 36 В применяется цикл на 25%, 50%, 75% и 100%.
 Широтно-импульсная модуляци
Широтно-импульсная модуляци
Управление двигателем при помощи Arduino и сгенерированным сигналом ШИМ
Для запуска процесса плата генерирует сигнал, который подается на обмотки двигателя. Чтобы контролировать величину подаваемого сигнала в рабочую схему включается транзистор. Который включается в разрыв питающей сети, а на его базу подается управляющий импульс от Arduino. Задавая определенные параметры работы набором команд для Arduino, транзистор будет переходить в открытое, закрытое или приоткрытое состояние.
На рисунке ниже вы можете увидеть пример схемы, на которой питание двигателя контролируется Arduino через транзистор. Как видите, здесь от ШИМ выхода подается сигнал на базу транзистора, а через его коллектор и эмиттер будет подаваться напряжение на обмотку.
 Принципиальная схема управления dc мотором
Принципиальная схема управления dc мотором
Программирование ардуино может выполняться с помощью компьютера, для этого используются как специальные утилиты, так и классические языки программирования. При программировании работы устройства вы можете использовать стандартный набор команд, который предоставит доступ к наиболее простым командам. Или собирать их в комбинации для формирования специфической логики работы устройства.
Пример программных команд для работы вышеприведенной схемы включения Arduino вы можете скачать по ссылке ниже. Применяя их, вы сможете управлять скоростью вращения, постепенно наращивая ее до максимального значения, и так же плавно снижая до полной остановки.
Полный скетч проекта:
Используемые команды:
- void setup – поле для установки рабочего выхода с ШИМ порта;
- void loop – поле для формирования рабочего процесса;
- motorSpeed – задает скорость вращения двигателя;
- analogWrite – задает работу конкретного вывода платы;
- delay – устанавливает величину временного промежутка.
При помощи этой программы и вышеприведенной схемы вы сможете легко изменять скорость вращения двигателя постоянного тока, но менять направление его вращения будет достаточно сложно. Так как потребуется изменить направление протекание электрического тока по обмоткам. Поэтому менять направление вращения куда удобнее при помощи Н-моста на полупроводниковых преобразователях.
Управление двигателем постоянного тока с использованием Н-моста
Если рассмотреть принцип действия, то Н-мост представляет собой логическую схему из четырех логических элементов (релейного или полупроводникового типа), способных переходить в два состояния (открытое и закрытое). В данном примере рассматривается мост собранный на полупроводниках. Простым изменением попарного состояния этих элементов двигатель будет вращаться то в одну, то в другую сторону без необходимости переключения его контактов.
Свое название данное устройство получило за счет внешнего сходства с буквой «Н», где каждая пара транзисторов находится в вертикальных элементах буквы, а непосредственно сам управляемый мотор в горизонтальном. Пример элементарного Н-моста из четырех транзисторов приведен на рисунке ниже. Попарно открывая и закрывая нужные элементы схемы, вы сможете пропускать ток через обмотки в противоположных направлениях.
 Схема H-моста
Схема H-моста
Посмотрите на рисунок, в этой схеме управление питанием двигателя происходит от выводов А и В, на которые подается управляющий потенциал.
Принцип определения направления вращения в Н-мосте происходит следующим образом:
- при подаче на базы транзисторов Q1 и Q4 импульса для открытия перехода происходит протекание тока по обмоткам двигателя в одном направлении;
- при подаче на базы транзисторов Q2 и Q3 импульса для открытия перехода ток будет протекать в противоположном направлении, в сравнении с предыдущим и произойдет реверсивное движение;
- попарное открытие транзисторов Q1 и Q3, Q2 и Q4 приводит к торможению ротора;
- открытие транзисторов в последовательности Q1 и Q2 или Q3 и Q4 совершенно недопустимо, поскольку оно приведет к возникновению короткого замыкания в цепи.
Применяя схему Н-моста для управления работой двигателя постоянного тока, вы сможете реализовать полный набор операций для электрической машины без необходимости переподключения ее выводов. В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию. Среди них наиболее популярными являются драйверы L293D и L298N.
Сравнивая оба драйвера, следует отметить, что L298N превосходит L293D как по параметрам работы, так и по доступным опциям. Несмотря на то, что L293D более дешевая модель, L298N, ввиду значительных преимуществ, стал использоваться куда чаще. Поэтому в данном примере мы рассмотрим принцип управления двигателем при помощи драйвера L298N и платы Arduino.
Что представляет собой драйвер L298N?
Данная плата содержит микросхему и 15 выходов для генерации управляющих сигналов. Предназначено для передачи сигналов к рабочим элементам индуктивного типа – обмоткам двигателя, катушкам реле и т.д. Конструктивно L298N позволяет подключать в работу до двух таких элементов, к примеру, через нее можно одновременно управлять двумя шаговыми двигателями.
На схеме ниже приведен пример распределения выводов L298N от рабочей микросхемы.
 L298N. Выводы
L298N. Выводы
- Vss – вывод питания для логических цепей в 5В;
- GND – нулевой вывод (он же корпус);
- INPUT1, INPUT 2, INPUT 3, INPUT 4 – позволяют плавно наращивать и уменьшать скорость вращения двигателя;
- OUTPUT1, OUTPUT2 – выводы для питания первой индуктивной нагрузки;
- OUTPUT3, OUTPUT4 – выводы для питания второй индуктивной нагрузки;
- Vs – вывод для переключения питания;
- ENABLE A, B – выводы, при помощи которых осуществляется раздельное управление каналами, могут устанавливать активный и пассивный режим (с регулируемой скоростью вращения и с установленной);
- CURRENT SENSING A, B – выводы для установки текущего режима.
Принцип управления двигателем при помощи Arduino и драйвера L298N
Благодаря наличию в драйвере L298N встроенного моста данная плата позволяет осуществлять одновременное управление сразу двумя электрическими машинами от двух пар выводов. Логическая схема в данном устройстве работает от напряжения в 5В, а питание самих электрических машин можно осуществлять до 45В включительно. Максимально допустимый ток для одного канала платы составляет 2А.
Как правило, этот драйвер имеет модульное исполнение, за счет чего в комплект модуля уже включены рабочие элементы, выводы и разъемы, необходимые для передачи управляющих сигналов. Пример такого драйвера показан на рисунке ниже:
 Пример драйвера L298N
Пример драйвера L298N
Теперь разберем, как осуществляется управление двигателем с помощью драйвера L298N. Подключение двигателя производится к винтовым клеммным зажимам – по паре для питания каждого моторчика. Остальные клеммные зажимы предназначены для подачи питания плюс и минус, а также получения пониженного напряжения (на них подается определенный уровень питающего напряжения, от которого работают двигатели, а внутренний преобразователь понижает его до 5В для собственных логических цепей). Штекерные выводы платы осуществляют широтно-импульсную модуляцию при формировании рабочих сигналов.
 Зажимы, куда подключать моторы
Зажимы, куда подключать моторы
Следует отметить, что клеммный зажим с тремя выводами не только подводит к плате питающее напряжение, но и позволяет получить его уже преобразованное для собственных нужд драйвера величиной в 5В, как показано на рисунке выше. Этот выход можно использовать для запитки того же Ардуино или для любых других устройств, которые питаются от 5В.
Немаловажным моментом для получения 5В от этого клеммного вывода является установка черной перемычки, которая отвечает за преобразование отличного от 5 В уровня напряжения, при условии, что его уровень ниже 12В. Если уровень питающего напряжения выше 12В, перемычку необходимо снять, так как внутренний преобразователь на него не рассчитан, а сама плата должна запитываться от 5В через третий вывод этого же клеммника.
Простой пример работы Arduino с драйвером L298N
Сейчас мы рассмотрим пример простой схемы совместного использования Arduino и L298N. Такой вариант позволяет управлять скоростью вращения вала и его направлением у двигателя постоянного тока. Для этого задается специальная программа на ПК, которая будет определять генерацию ШИМ сигнала от L298N и направление протекания электрического тока через Н-мост. Разумеется, для формирования схемы потребуются еще несколько дополнительных компонентов, которые позволят соединить между собой драйвер, Ардуино, компьютер и двигатели.
 Схема совместного использования Arduino и L298N
Схема совместного использования Arduino и L298N
Перечень необходимых компонентов для сборки схемы:
- Arduino UNO — наиболее простая модель из линейки, но его функционала будет более чем достаточно. Если вы используете более продвинутый вариант, то он также хорошо справится с этой задачей.
- Драйвер L298N – не самый доступный драйвер, но заменить его другим не получится, так как принцип работы похожих моделей может в корне отличаться.
- Двигатель на 12 В – в данном примере используется электрическая машина постоянного тока.
- Потенциометр 100 кОм.
- Кнопка для коммутации цепи.
- Источник питания 12 В — может подойти любой вариант, включая несколько пальчиковых батареек.
- Плата для установки элементов.
- Соединительные провода, желательно с готовыми штекерами папа/мама.
| Компонент | Спецификация | Количество | Где купить |
|---|---|---|---|
| Arduino | UNO Rev3.0 | 1 | Ссылка |
| Драйвер | L298N | 1 | Ссылка |
| Мини-двигатель | 12В, DC, 6000 об/мин. | 1 | Ссылка |
| Блок питания | 12 Вольт | 1 | Ссылка |
| Кнопка | Micro SMD SMT | 1 | Ссылка |
| Потенциометр | 100 кОм | 1 | Ссылка |
| Соединительные провода | папа-мама | Ссылка |
Полный код проекта:
Практическое применение.
Программирование работы электрическими двигателями широко используется в робототехнике, к примеру, ваше изобретение, оснащенное колесами, сможет осуществлять движение и в прямом, и в обратном направлении. Как вы могли уже убедиться, совместная работа Arduino и драйвера L298N сможет без проблем решить такую задачу. При этом вы можете обеспечить одновременную работу сразу двух двигателей от одного драйвера, то есть управлять сразу двумя колесами, причем независимо друг от друга.
В другом варианте двигатели, управляемые Arduino и драйвером L298N могут перемещать руки робота в прямом и реверсивном направлении, передвигаться по линейной траектории и т.д. Полный перечень возможностей платы Arduino и драйвера L298N ограничивается только вашей собственной фантазией, поэтому вы можете самостоятельно найти им интересное применение.







