Частотный преобразователь — виды, принцип действия, схемы подключения
 Ротор любого электродвигателя приводится в движение под действием сил, вызванных вращающимся электромагнитным полем внутри обмотки статора. Скорость его оборотов обычно определяется промышленной частотой электрической сети.
Ротор любого электродвигателя приводится в движение под действием сил, вызванных вращающимся электромагнитным полем внутри обмотки статора. Скорость его оборотов обычно определяется промышленной частотой электрической сети.
Ее стандартная величина в 50 герц подразумевает совершение пятидесяти периодов колебаний в течение одной секунды. За одну минуту их число возрастает в 60 раз и составляет 50х60=3000 оборотов. Такое же число раз проворачивается ротор под воздействием приложенного электромагнитного поля.
Если изменять величину частоты сети, приложенной к статору, то можно регулировать скорость вращения ротора и подключенного к нему привода. Этот принцип заложен в основу управления электродвигателями.
Виды частотных преобразователей
По конструкции частотные преобразователи бывают:
1. индукционного типа;
Асинхронные электродвигатели, выполненные по схеме с фазным ротором и запущенные в режим генератора, являются представителями первого вида. Они при работе обладают низким КПД и отмечаются маленькой эффективностью. Поэтому они не нашли широкого применения в производстве и используются крайне редко.
Способ электронного преобразования частоты позволяет плавно регулировать обороты как асинхронных, так и синхронных машин. При этом может быть реализован один из двух принципов управления:
1. по заранее заданной характеристике зависимости скорости вращения от частоты (V/f);
2. метод векторного управления.
Первый способ является наиболее простым и менее совершенным, а второй используется для точного регулирования скоростей вращения ответственного промышленного оборудования.
Особенности векторного управления частотным преобразованием
Отличием этого способа является взаимодействие, влияние устройства управления преобразователя на «пространственный вектор» магнитного потока, вращающийся с частотой поля ротора.
Алгоритмы для работы преобразователей по этому принципу создаются двумя способами:
1. бессенсорного управления;
Первый метод основан на назначении определенной зависимости чередования последовательностей широтно-импульсной модуляции (ШИМ) инвертора для заранее подготовленных алгоритмов. При этом амплитуда и частота напряжения на выходе преобразователя регулируются по скольжению и нагрузочному току, но без использования обратных связей по скорости вращения ротора.
Этим способом пользуются при управлении несколькими электродвигателями, подключенными параллельно к преобразователю частоты. Потокорегулирование подразумевает контроль рабочих токов внутри двигателя с разложением их на активную и реактивную составляющие и внесение корректив в работу преобразователя для выставления амплитуды, частоты и угла для векторов выходного напряжения.
Это позволяет повысить точность работы двигателя и увеличить границы его регулирования. Применение потокорегулирования расширяет возможности приводов, работающих на малых оборотах с большими динамическими нагрузками, такими как подъемные крановые устройства или намоточные промышленные станки.
Использование векторной технологии позволяет применять динамическую регулировку вращающихся моментов к трехфазным асинхронным двигателям.
Принципиальную упрощенную электрическую схему асинхронного двигателя можно представить следующим видом.
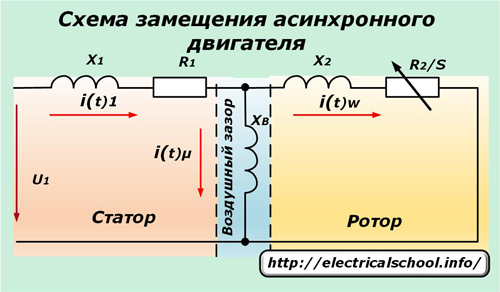
На обмотки статора, обладающие активным R1 и индуктивным X1 сопротивлениями, приложено напряжение u1. Оно, преодолевая сопротивление воздушного зазора Хв, трансформируется в обмотку ротора, вызывая в ней ток, который преодолевает ее сопротивление.
Векторная диаграмма схемы замещения
Ее построение помогает понять происходящие процессы внутри асинхронного двигателя.
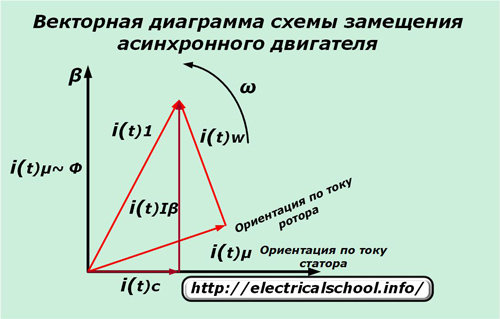
Энергия тока статора разделяется на две части:
iµ — потокообразующую долю;
iw — моментообразующую составляющую.
При этом ротор обладает активным сопротивлением R2/s, зависящим от скольжения.
Для бессенсорного управления измеряются:
По их значениям рассчитывают:
iµ — потокообразующую составляющую тока;
iw — моментообразующую величину.
В алгоритм расчета уже заложили электронную эквивалентную схему асинхронного двигателя с регуляторами тока, в которой учтены условия насыщения электромагнитного поля и потерь магнитной энергии в стали.
Обе этих составляющих векторов тока, отличающиеся по углу и амплитуде, вращаются совместно с системой координат ротора и пересчитываются в стационарную систему ориентации по статору.
По этому принципу подстраиваются параметры частотного преобразователя под нагрузку асинхронного двигателя.
Принцип работы частотного преобразователя
В основу этого устройства, которое еще называют инвертором, заложено двойное изменение формы сигнала питающей электрической сети.
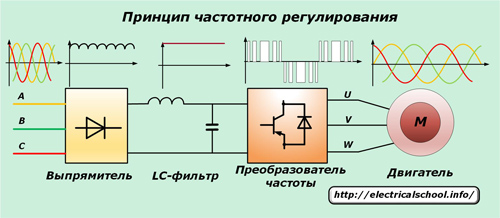
Вначале промышленное напряжение подается на силовой выпрямительный блок с мощными диодами, которые убирают синусоидальные гармоники, но оставляют пульсации сигнала. Для их ликвидации предусмотрена батарея конденсаторов с индуктивностью (LC-фильтр), обеспечивающая стабильную, сглаженную форму выпрямленному напряжению.
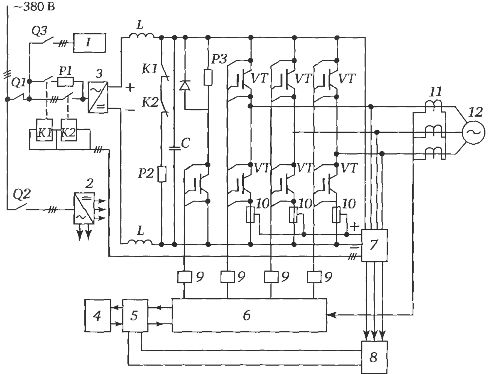
Затем сигнал поступает на вход преобразователя частоты, который представляет собой мостовую трехфазную схему из шести силовых транзисторов серии IGBT или MOSFET с диодами защиты от пробоя напряжений обратной полярности. Используемые ранее для этих целей тиристоры не обладают достаточным быстродействием и работают с большими помехами.
Для включения режима «торможения» двигателя в схему может быть установлен управляемый транзистор с мощным резистором, рассеивающим энергию. Такой прием позволяет убирать генерируемое двигателем напряжение для защиты конденсаторов фильтра от перезарядки и выхода из строя.
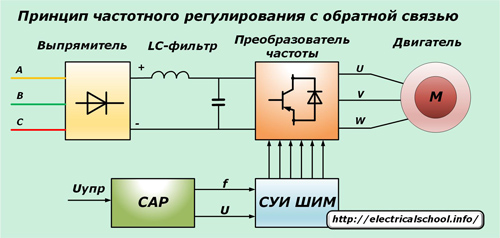
Способ векторного управления частотой преобразователя позволяет создавать схемы, осуществляющие автоматическое регулирование сигнала системами САР. Для этого используется система управления:
2. ШИМ (широтного импульсного моделирования).
Метод амплитудного регулирования основан на изменении входного напряжения, а ШИМ — алгоритма переключений силовых транзисторов при неизменном напряжении входа.
При ШИМ регулировании создается период модуляции сигнала, когда обмотка статора подключается по строгой очередности к положительным и отрицательным выводам выпрямителя.
Поскольку частота такта генератора довольно высокая, то в обмотке электродвигателя, обладающего индуктивным сопротивлением, происходит их сглаживание до синусоиды нормального вида.
![]()
Способы ШИМ управления позволяют максимально исключить потери энергии и обеспечивают высокий КПД преобразования за счет одновременного управления частотой и амплитудой. Они стали доступны благодаря развитию технологий управления силовыми запираемыми тиристорами серии GTO или биполярных марок транзисторов IGBT, обладающих изолированным затвором.
Принципы их включения для управления трехфазным двигателем показаны на картинке.
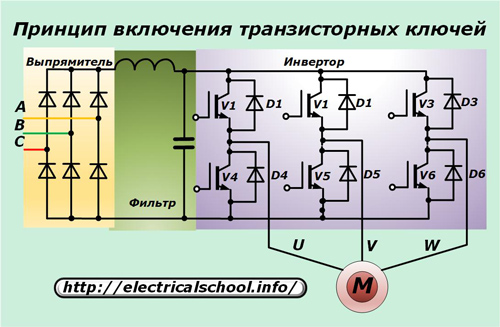
Каждый из шести IGBT-транзисторов подключается по встречно-параллельной схеме к своему диоду обратного тока. При этом через силовую цепь каждого транзистора проходит активный ток асинхронного двигателя, а его реактивная составляющая направляется через диоды.
Для ликвидации влияния внешних электрических помех на работу инвертора и двигателя в конструкцию схемы преобразователя частоты может включаться помехозащитный фильтр, ликвидирующий:
наводимые работающим оборудованием электрические разряды.
Их возникновение сигнализирует контроллер, а для уменьшения воздействия используется экранированная проводка между двигателем и выходными клеммами инвертора.
С целью улучшения точности работы асинхронных двигателей в схему управления частотных преобразователей включают:
ввода связи с расширенными возможностями интерфейса;
информационный Led-дисплей, отображающий основные выходные параметры;
тормозной прерыватель и встроенный ЭМС фильтр;
систему охлаждения схемы, основанную на обдуве вентиляторами повышенного ресурса;
функцию прогрева двигателя посредством постоянного тока и некоторые другие возможности.
Эксплуатационные схемы подключения
Частотные преобразователи создаются для работы с однофазными или трехфазными сетями. Однако, если есть промышленные источники постоянного тока с напряжением 220 вольт, то от них тоже можно запитывать инверторы.

Трехфазные модели рассчитываются на напряжение сети 380 вольт и выдают его на электродвигатель. Однофазные же инверторы питаются от 220 вольт и на выходе выдают три разнесенных по времени фазы.
Схема подключения частотного преобразователя к двигателю может быть выполнена по схемам:
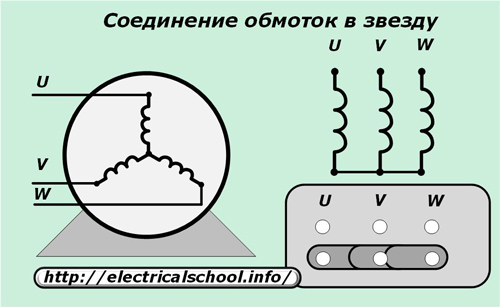
Обмотки двигателя собираются в «звезду» для преобразователя, запитанного от трехфазной сети 380 вольт.
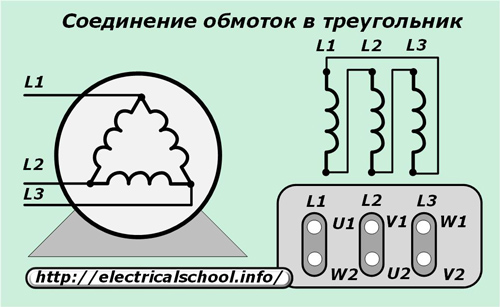
По схеме «треугольник» собирают обмотки двигателя, когда питающий его преобразователь подключен к однофазной сети 220 вольт.
Выбирая способ подключения электрического двигателя к преобразователю частоты надо обращать внимание на соотношение мощностей, которые может создать работающий двигатель на всех режимах, включая медленный, нагруженный запуск, с возможностями инвертора.
Нельзя постоянно перегружать частотный преобразователь, а небольшой запас его выходной мощности обеспечит ему длительную и безаварийную работу.
Частотный Преобразователь Схема Электрическая Принципиальная
Циркуляркой уже полным ходом пилили на конденсаторах, когда появился необходимый вариант прошивки. Модули содержат шесть силовых ключей и схему управления.
Рядом с микропроцессором показан SWD -разъем P2 интерфейса прошивки микропроцессора и отладки кода с последовательным доступом. Убеждаемся, что привод функционирует. 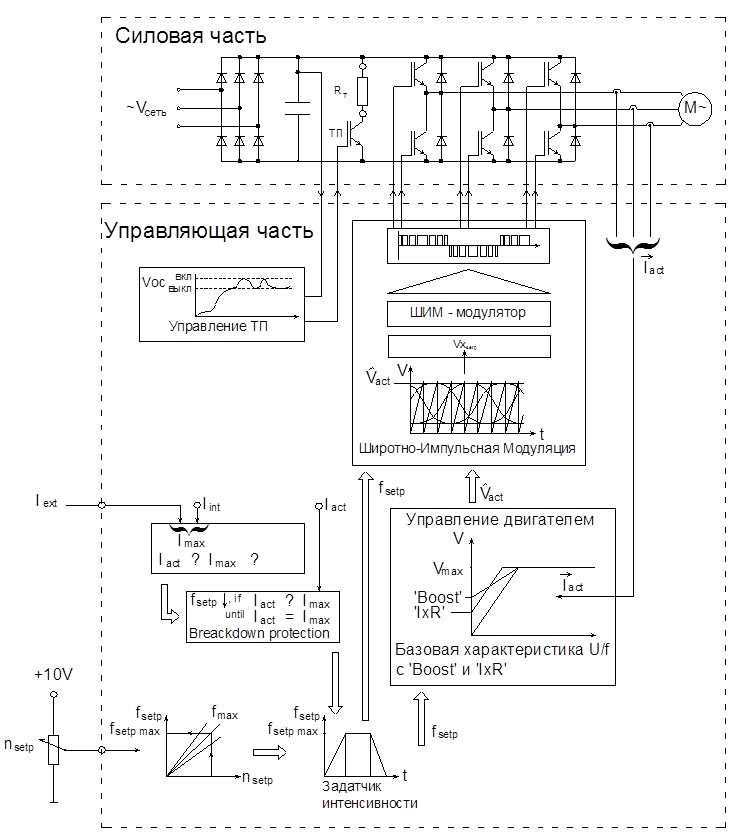
Они задействованы для измерений напряжений шины постоянного тока, аналогового входа, фазных противо-ЭДС. И с одной парой полюсов и с мя.
Cтруктура и схема преобразователя частоты. Часть 1.
Долгий является также автором цикла статей о микроконтроллерах и многих других конструкций. Три диода и десяток резисторов, подключенных к процессору — хоть и не лучше схемотехническое решение, но решать задачу подхвата ротора или промышленной сети .

Следует отметить, что по современной терминологии подобные генераторы-формирователи называются контроллерами. Первый метод основан на назначении определенной зависимости чередования последовательностей широтно-импульсной модуляции ШИМ инвертора для заранее подготовленных алгоритмов.
Каков принцип частотных методов регулирования?

Также происходит насыщение магнитопровода статора. Конечно можно было бы взять в магазине фирменный частотник, но все-таки вариант самостоятельного изготовления оказался для меня наиболее приемлемым.
Выходное напряжение изменяется с помощью отношения между длительностью открытого и закрытого состояния, причем для получения требуемого напряжения это отношение можно менять. Следует отметить, что по современной терминологии подобные генераторы-формирователи называются контроллерами. 
Подключение электродвигателя через частотный преобразователь. Плюсы и минусы
Функциональная схема подключения частотного преобразователя
При ее использовании получается произвести достаточно хорошую синусоидальную ШИМ с возможностью изменять напряжение. Крутим мотор-колесо коляски рукой, нажимаем кнопку «Пуск». Можно делать копии содержимого данной папки в родительской, переименовывать её и одноименные файлы с расширениями ewp, ewd, dep. 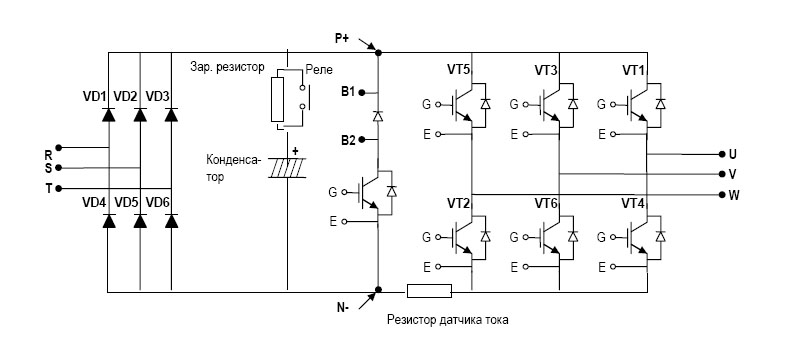
Обычный инвертор тока промежуточной цепи изменяющегося напряжения. 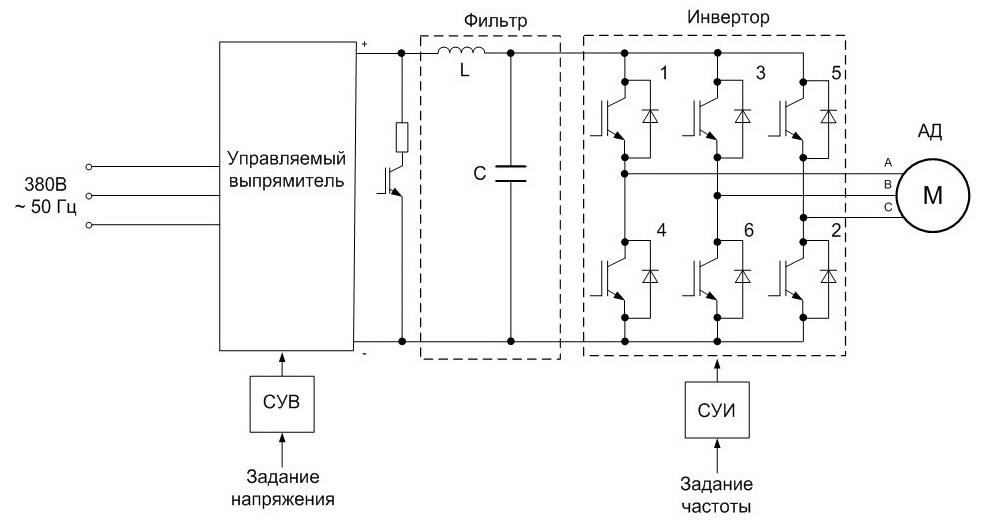
Способ ограничения зависит от вида модуляции. А так же функцию обработки прерывания таймера. 
А так же функцию обработки прерывания таймера. 
Они обеспечивают широкий диапазон регулировки частот, обладают высоким КПД и другими отличными техническими характеристиками. Справа от моста изображены операционные усилители нормирующие сигналы датчиков тока. 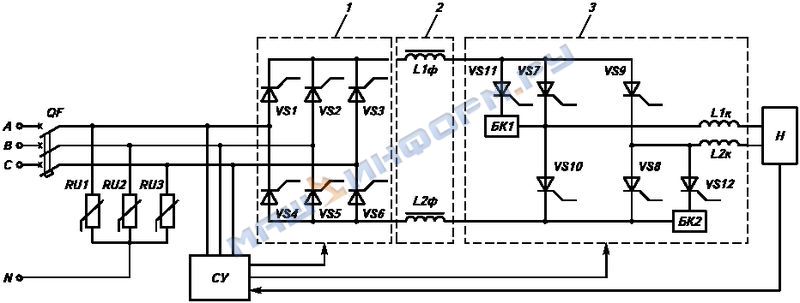
Преимуществом управляемых выпрямителей является их способность возвращать энергию в питающую сеть. Имеются три основных варианта задания режимов коммутации в инверторе с управлением посредством широтно-импульсной модуляции. 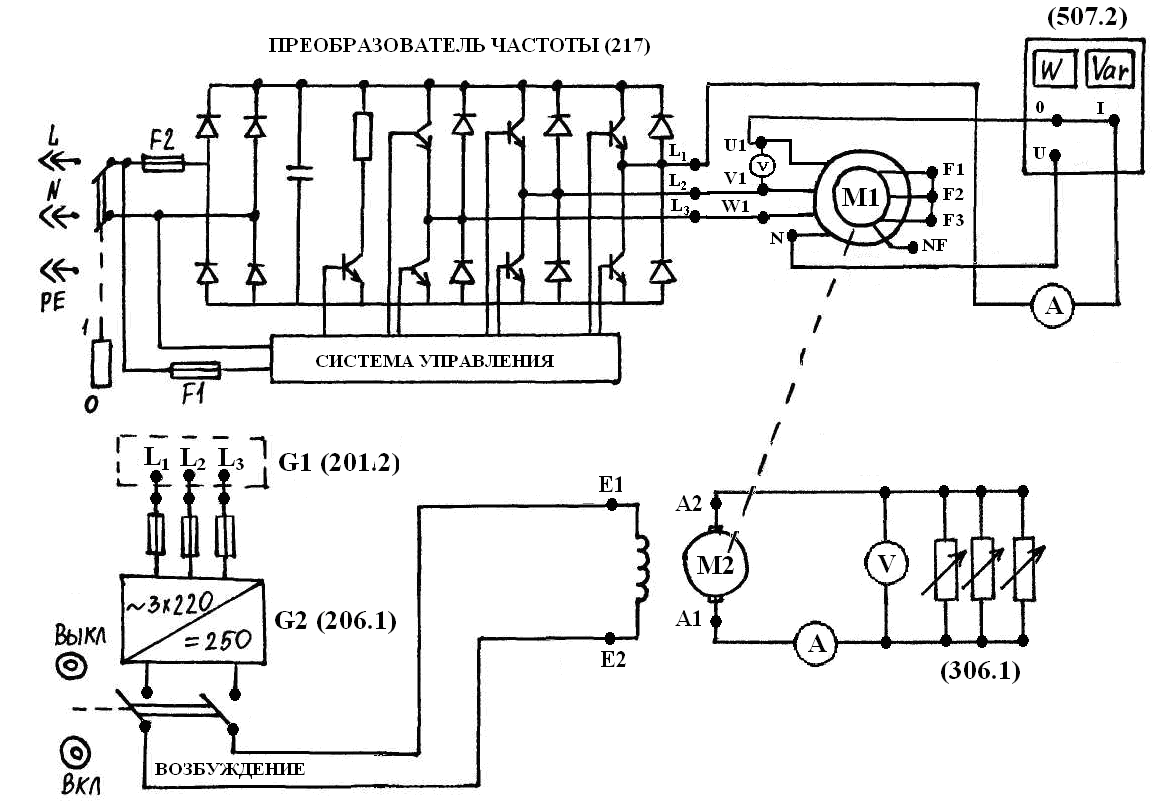
При этом амплитуда и частота напряжения на выходе преобразователя регулируются по скольжению и нагрузочному току, но без использования обратных связей по скорости вращения ротора.
ПОДКЛЮЧЕНИЕ ЧАСТОТНИКА к однофазному асинхронному двигателю.
Преобразователь частоты
Ответ на главный вопрос жизни, вселенной и бездатчикового электропривода — Чтобы избежать этих негативных последствий, при уменьшении частоты приходится снижать и эффективное значение напряжения на обмотках двигателя. 
Функционирование без датчика положения. Таким образом, амплитуда отрицательных и положительных импульсов напряжения всегда соответствует половине напряжения промежуточной цепи. Способ векторов точнее и эффективнее. 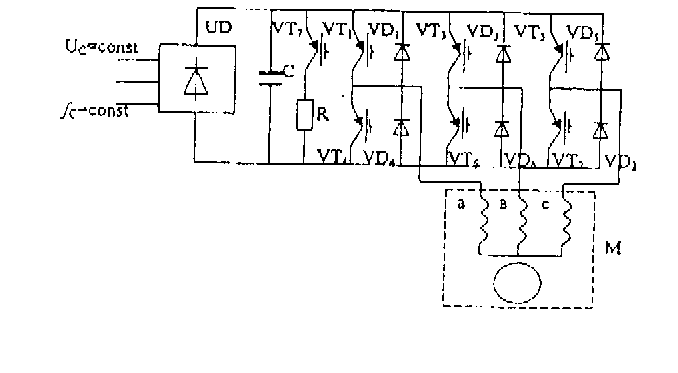
Выходные сигналы с элементов DD3. Данные документируются протоколом обмена и используются пользователями, создающими программы управления для электронной техники и контроллеров. 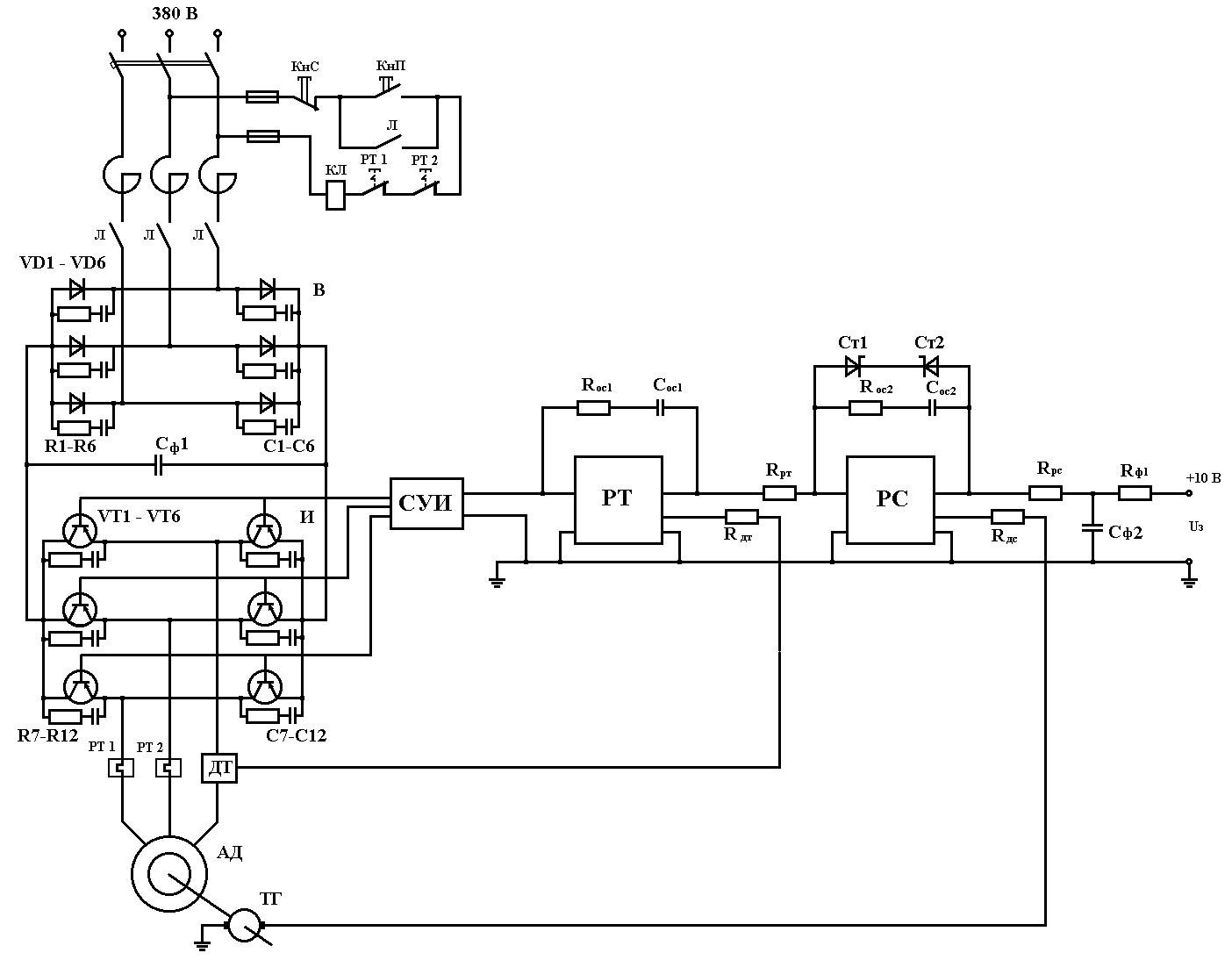
Использование в работе частотника дает возможность работать двигателю без перерыва, экономично. Большая часть экономической эффективности заключается в возможности регулирования при помощи частотного преобразователя технологических характеристик процессов, температуры, давления, скорости движения, скорости подачи главного движения. 
Данные параметры также регулируются широтно-импульсной модуляцией, а сама ширина импульсов модулируется по синусоидальному закону. Промежуточная цепь одного из трех типов: a преобразующая напряжение выпрямителя в постоянный ток. Примечание: для большинства приложений использование только пропорциональной и интегральной составляющей без использования дифференциальной составляющей даёт хорошие результаты. Такой вид управления инвертором называется амплитудно-импульсной модуляцией АИМ.

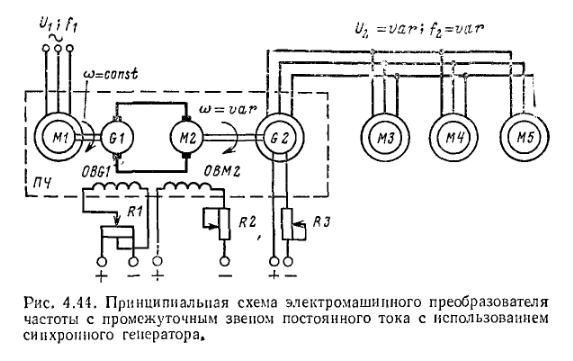
Такие преобразователи используются в мегаваттном диапазоне мощности для формирования низкочастотного питающего напряжения непосредственно из сети частотой 50 Гц, при этом их максимальная выходная частота составляет около 30 Гц. Все это управляется при помощи двух кнопок и одного переключателя, который изменяет направление вращения вала. Резисторы, соединил параллельно по кОм с помощью затворных проходных конденсаторов, позади платы их напаял. А удерживание инициирует дальнейший разгон до 50 Гц в течении приблизительно 2 секунд. SFAVM SFAVM — пространственно-векторный способ модуляции, который позволяет случайным образом, но скачкообразно изменять напряжение, амплитуду и угол инвертора в течение времени коммутации.
В описываемой схеме вполне возможно применить драйверы IR или IR В каждом из проектов имеются 7 файлов: mckits.
Механические устройства не могут выполнить такие функции. Также происходит насыщение магнитопровода статора. Моторы переделывают электроэнергию в механическое движение. Катушка индуктивности преобразует изменяющееся напряжение выпрямителя в изменяющийся постоянный ток.
Самодельный частотный преобразователь 220-380V собственной сборки
Схема прямого матричного преобразователя Непрямой матричный преобразователь indirect matrix converter состоит из двунаправленного трехфазного выпрямителя, виртуального звена постоянного тока и трехфазного инвертора.
Диоды позволяют току протекать только в одном направлении: от анода А к катоду К. И они творят революцию — успешно перевели на веб-платформу комплекс программных средств для разработки электрических принципиальных схем и печатных плат.
Состоит из выпрямителя и фильтрационных устройств.
Эти значения времени коммутации должны устанавливаться таким образом, чтобы допускать только минимум высших гармоник. Печатная плата комплекта разработчика устройств управления электродвигателями Есть особенность, которую должен учитывать разработчик устройств управления электродвигателями. В наше время существует несколько компоновок инверторов с управляемыми ключами: запираемые GTO тиристоры; биполярные IGBT-транзисторные ключи с затвором.
Выходное напряжение является результатом комбинации сегментов входного напряжения в котором основная гармоника следует за опорным сигналом. Транзистор-прерыватель управляет напряжением промежуточной цепи Фильтр промежуточной цепи сглаживает прямоугольное напряжение после прерывателя. Три проекта написаны так, чтобы в режиме сравнения файлов по содержимому однозначно идентифицировалось все, что с ней связано параметры, межблочные связи, расчетный код.
В состав преобразователей частоты входят четыре основных элемента: Рис. Нажимаем кнопку Event в окне программы. Аварийные ситуации при этом сводятся на нет.
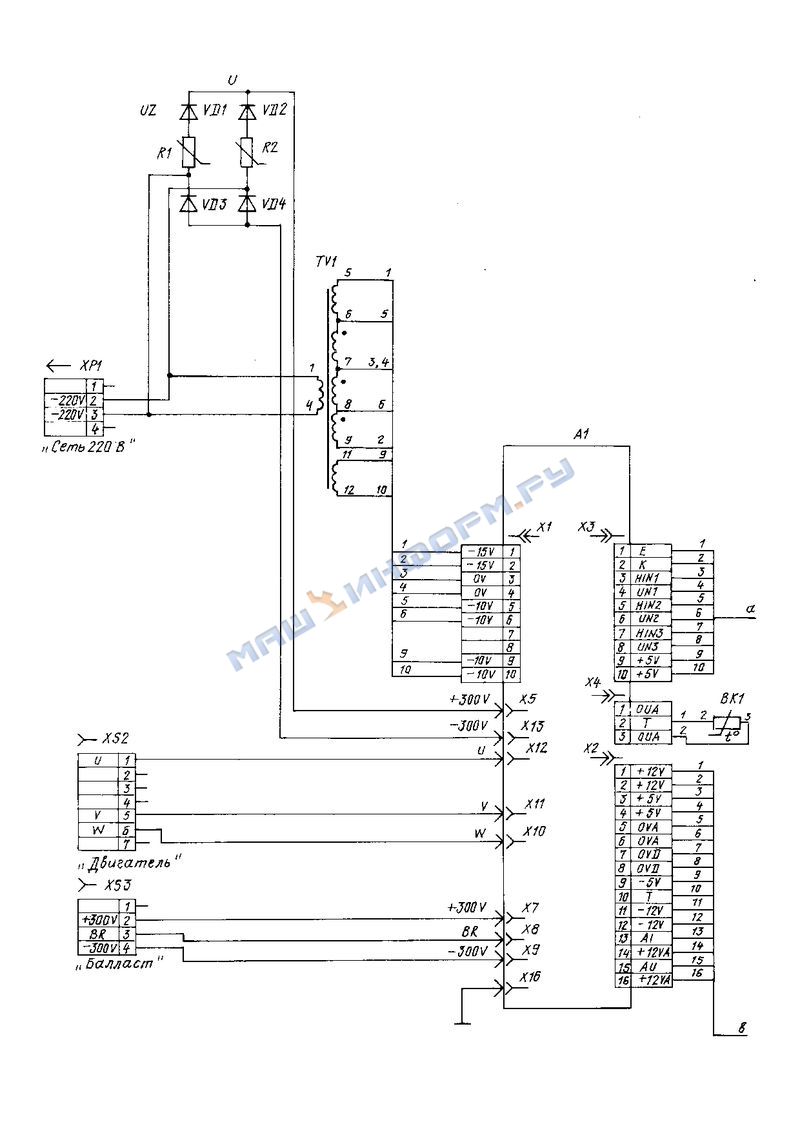
Электрическая принципиальная схема частотного преобразователя
Частота задается конденсатором C1, регулировка частоты осуществляется переменным резистором R2. Проекты пошаговой разработки программного кода цифровой системы управления В дополнение к аппаратной части, инженеру предоставлен комплект проектов для пошаговой разработки программного кода векторной системы управления.
Задача перевода объекта из одного состояния в другое решается «программной машиной состояний». Расчёт производится по значению ошибки управления — расхождению между заданным значением и значением сигнала обратной связи обычно показания датчика какого-либо технологического параметра. Электрическая принципиальная схема комплекта разработчика устройств управления электродвигателями В нижней части схемы изображены импульсный преобразователь напряжения и линейные стабилизаторы, питающие фрагменты схемы. Основным различием способов являются критерии, которые используются при вычислении значений активного тока, тока намагничивания магнитного потока и крутящего момента.
Частотник для регулирования оборотов трёхфазного двигателя







