Асинхронный двигатель особенности работы
Главное меню
Судовые двигатели
В современной электроэнергетике почти повсеместно переменный ток вытесняет постоянный. Это объясняется многими преимуществами машин переменного тока в сравнении с машинами постоянного тока. В частности, у машин переменного тока вес, габариты и стоимость меньше, а к. п. д. выше; они проще в обслуживании, долговечнее и надежнее машин постоянного тока. Правда, электродвигатели переменного тока хуже поддаются регулировке, они развивают значительно меньшие пусковые моменты. Поэтому, если от электродвигателей требуются высокие регулировочные качества и повышенные пусковые моменты, применяют электродвигатели постоянного тока.
Привод механизмов портовых подъемно-транспортных машин чаще всего осуществляется асинхронными электродвигателями трехфазного переменного тока, получившими наибольшее распространение в электроэнергетике. Зависимости от исполнения ротора, различают асинхронные электродвигатели с короткозамкнутым ротором и с фазным ротором (с контактными кольцами). Принципиальная схема включения этих электродвигателей приведена на рис. 40..
Из курса электротехники известно, что принцип действия асинхронных электродвигателей основан на использовании так называемого вращающегося магнитного поля. При подаче трехфазного тока в обмотке статора создается магнитное поле, вращающееся со скоростью

где f— частота тока в обмотке статора;
р — число пар полюсов обмотки статора.
Эта скорость называется синхронной. Магнитное поле статора, (пересекая обмотку ротора, наводит в ней э. д. с., которая создает в цепи ротора ток. Последний, взаимодействуя с магнитным полем статора, образует вращающий момент, заставляющий ротор вращаться в ту же сторону, что и магнитное поле статора. При нормальной работе асинхронного электродвигателя его ротор вращается со скоростью п 2 1 . Если бы скорость вращения ротора была равна скорости, с которой вращается магнитное поле статора, то последнее относительно ротора было бы неподвижным. В этом случае э. д. с. и ток в обмотке ротора были бы равны нулю и никакого вращающего момента не возникло бы.

Величиной, характеризующей работу асинхронного электродвигателя, является скольжение s :

где n 1 —синхронная скорость;
n 2 — скорость вращения ротора.
Зная скольжение, нетрудно определить скорость вращения электродвигателя

При работе электродвигателя без нагрузки скорость его близка к синхронной, а скольжение очень мало.
Двигательный режим асинхронного электродвигателя имеет место при скольжениях, изменяющихся в пределах от 0 до 1, при этом число оборотов ротора изменяется от n 1 до 0. Номинальная величина скольжения асинхронного электродвигателя составляет 0,03—0,1, причем первая цифра относится к более мощным, а вторая — к менее мощным электродвигателям (до 10—20 квт).
Очевидно, s = 0 в том случае, когда ротор вращается с синхронной скоростью n 1 . Можно считать, что на холостом ходу электродвигателя его ротор вращается с этой скоростью, если не учитывается трение.
Величина скольжения s =1, когда ротор электродвигателя не вращается при включенной обмотке статора. Этот режим называют режимом короткого замыкания электродвигателя (или режимом стоянки под током). Получить режим короткого замыкания можно, искусственно затормозив ротор или перегрузив электродвигатель до полной остановки его. Пуск асинхронного электродвигателя также начинается именно с этого режима.
Выражение (81) показывает, что скольжение может изменяться гораздо в больших пределах, чем указано выше. Действительно, ротор электродвигателя под действием постороннего источника механической энергии (например, под действием опускающегося груза) может вращаться со скоростью больше синхронной. В этом случае скольжение будет отрицательным (s 2 >n 1 .
Можно также представить, что ротор электродвигателя под действием опускающегося груза вращается в направлении, противоположном направлению вращения магнитного поля статора. В этом случае s>1, так как в выражение (81) величину п 2 нужно подставить с отрицательным знаком. Такой режим называется режимом противовключения.
Таким образом, теоретически скольжение асинхронного электродвигателя может изменяться в пределах от —? до + ?. Практически же скольжение асинхронного электродвигателя при работе последнего в двигательном и тормозных режима« изменяется в пределах от —2 до +2.
Из курса электрических машин известно, что для асинхронного электродвигателя может быть составлена схема замещения, с помощью которой производится анализ работы электродвигателя и исследуются режимы его работы. На рис. 41 приведена упрощенная схема замещения асинхронного электродвигателя, в которой приняты следующие обозначения:
U 1 — фазное напряжение обмотки статора, в;
I 1 — фазный ток обмотки статора, а;
I 0 — фазный ток холостого хода электродвигателя, а;
I 2 — приведенный фазный ток обмотки ротора, а;
r 1 и х 1 — активное и индуктивное сопротивления фазы обмотки статора, ом;
r 2 ’ и х 2 ‘ — приведенные активное и индуктивное сопротивления фазы обмотки ротора, ом.
Для приведенных величин могут быть выведены следующие соотношения:

где т 1 и т 2 — число фаз обмоток статора и ротора;
к = U 1н / E 2н — коэффициент трансформации э. д. с. (U 1н — номинальное фазное напряжение обмотки статора; E 2н — фазная э. д. с. обмотки ротора при разомкнутых контактных кольцах).

Мощность Р 1 забираемая электродвигателем из сети, определяется напряжением сети U 1 , током статора I 1 зависящим от нагрузки, и коэффициентом мощности cos? т.е.

Мощность на валу электродвигателя зависит от его к. п. д.? и может быть вычислена по формуле

Если пренебречь механическими и вентиляционными потерями, которые незначительны, то можно считать, что механическая мощность асинхронного электродвигателя (мощность на валу) равна, потерям мощности в сопротивлении  схемы замещения, приведенной на рис. 41, т. е.
схемы замещения, приведенной на рис. 41, т. е.

где т 2 = т 1 — приведенное число фаз обмотки ротора.
Между токами асинхронного электродвигателя, согласно схеме замещения, существует зависимость

Ток статора асинхронных электродвигателей I 1 очень велик даже при отсутствии нагрузки на валу. Это объясняется тем, что намагничивающий ток этих электродвигателей составляет 50—70% номинального тока статора.
Асинхронный электродвигатель: устройство, принцип работы, виды
Одним из наиболее распространенных типов электрических машин в мире является асинхронный электродвигатель. За счет высокой надежности и неприхотливости в работе такие агрегаты получили широкое распространение в самых различных отраслях промышленности и сельского хозяйства, они помогают решать бытовые и общепроизводственные задачи любой сложности. Поэтому в данной статье мы детально рассмотрим особенности асинхронных двигателей.
Устройство
Конструктивно простейшая асинхронная машина представляет собой рамку, вращающуюся в переменном магнитном поле. Однако на практике данная модель носит скорее ознакомительный характер и практического применения в промышленности не имеет. Поэтому на рисунке 1 ниже мы рассмотрим устройство действующей модели асинхронного электродвигателя.
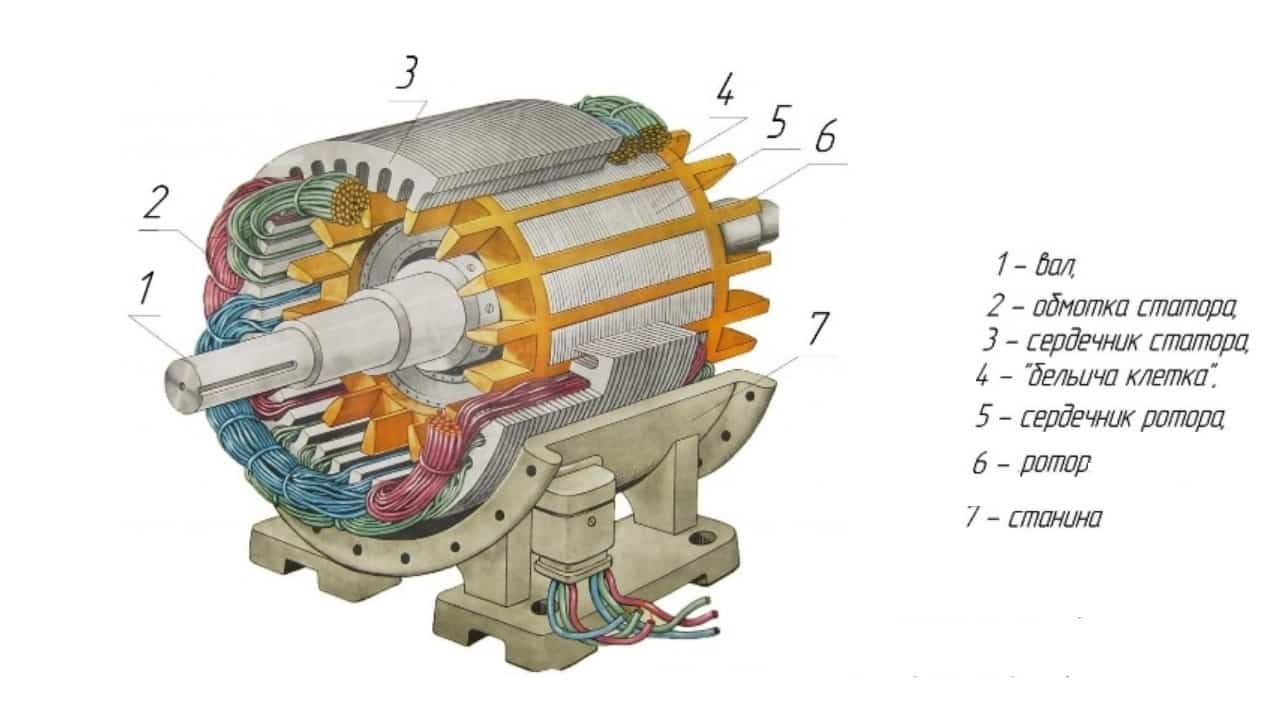 Рис. 1. Устройство асинхронного электродвигателя
Рис. 1. Устройство асинхронного электродвигателя
Весь двигатель располагается в корпусе станины 7, ее основная задача состоит в обеспечении достаточной механической прочности, способной выдерживать достаточные усилия. Поэтому чем выше мощность агрегата, тем большей прочностью должна обладать станина и корпус.
Внутрь корпуса устанавливается сердечник статора 3, выступающий в роли магнитного проводника для силовых линий рабочего поля. С целью уменьшения потерь в стали магнитопровод выполняется наборным из шихтованных листов, однако в ряде моделей применяется и монолитный вариант.
В пазы сердечника статора укладывается обмотка 2, предназначенная для пропуска электрического тока и формирования ЭДС. Число обмоток будет зависеть от количества пар полюсов на каждую фазу. Также в части уложенных обмоток электродвигатели подразделяются на:
Внутри статора располагается подвижный элемент – ротор 6. По конструкции ротор может быть короткозамкнутым или фазным, на рисунке приведен первый вариант. В состав ротора входит сердечник 5, также набранный из шихтованной стали и беличья клетка 4. Вся конструкция насажена на металлический вал 1, передающий вращение и механическое усилие.
Принцип работы
Заключается в формировании электромагнитного поля вокруг проводника, по которому протекает электрический ток. Для асинхронного электродвигателя данный процесс начинается сразу после подачи напряжения на обмотки статора, после чего в роторе наводится ЭДС взаимоиндукции, индуцирующей вихревые токи в металлическом каркасе. Наличие вихревых токов обуславливает генерацию собственной ЭДС, которая формирует электромагнитное поле ротора. Наиболее эффективный КПД асинхронной электрической машины получается при работе от трехфазной сети.
Конструктивно обмотки статора имеют смещение в пространстве друг относительно друга на 120°, что показано на рисунке 2 ниже:
 Рис. 2. Геометрическое смещение фаз в статоре
Рис. 2. Геометрическое смещение фаз в статоре
Такой прием позволяет отстроить магнитное поле рабочих обмоток в строгом соответствии с напряжением трехфазной сети, которое имеет аналогичную разность кривых электрической величины.
 Рис. 3. Принцип формирования магнитного потока асинхронного двигателя
Рис. 3. Принцип формирования магнитного потока асинхронного двигателя
На рисунке 3 выше все три фазы изображены в разных цветах для упрощения понимания процесса, также здесь изображена кривая токов, протекающих в фазах асинхронного электродвигателя. Теперь рассмотрим физические процессы в обмотках двигателя для трех позиций показанных на рисунке:
- I – в этой позиции максимальный ток протекает в красной обмотке электродвигателя, а значение силы тока в желтой и синей равны. Основной поток силовых линий формируется красной фазой, а два других дополняют его.
- II – в данной точке желтая синусоида равна нулю, поэтому никакого потока не создает, а сила тока красной и синей равны. Поток формируется сразу двумя фазами и смещается по часовой стрелке вправо, совершая поворот.
- III – третья точка характеризуется максимумом токовой нагрузки для синей кривой, а красная и желтая имеет равную амплитуду, но противоположную по направлению. В результате чего максимум магнитных линий южного и северного полюса сместиться еще на 30°.
По данному принципу магнитное поле статора вращается в асинхронной электрической машине в течении периода. За счет магнитного взаимодействия с полем статора асинхронного электродвигателя происходит поступательное движение ротора вокруг своей оси. Можно сказать, что ротор пытается догнать поле статора. Именно за счет разницы во вращении полей данный тип электрической машины получил название асинхронной.
Отличие от синхронного двигателя
Наряду с простыми асинхронными электрическими машинами в промышленности также используются и синхронные агрегаты. Основным отличием синхронного двигателя является наличие вспомогательной обмотки на роторе, предназначенной для создания постоянного магнитного потока, что показано на рисунке 4 ниже.
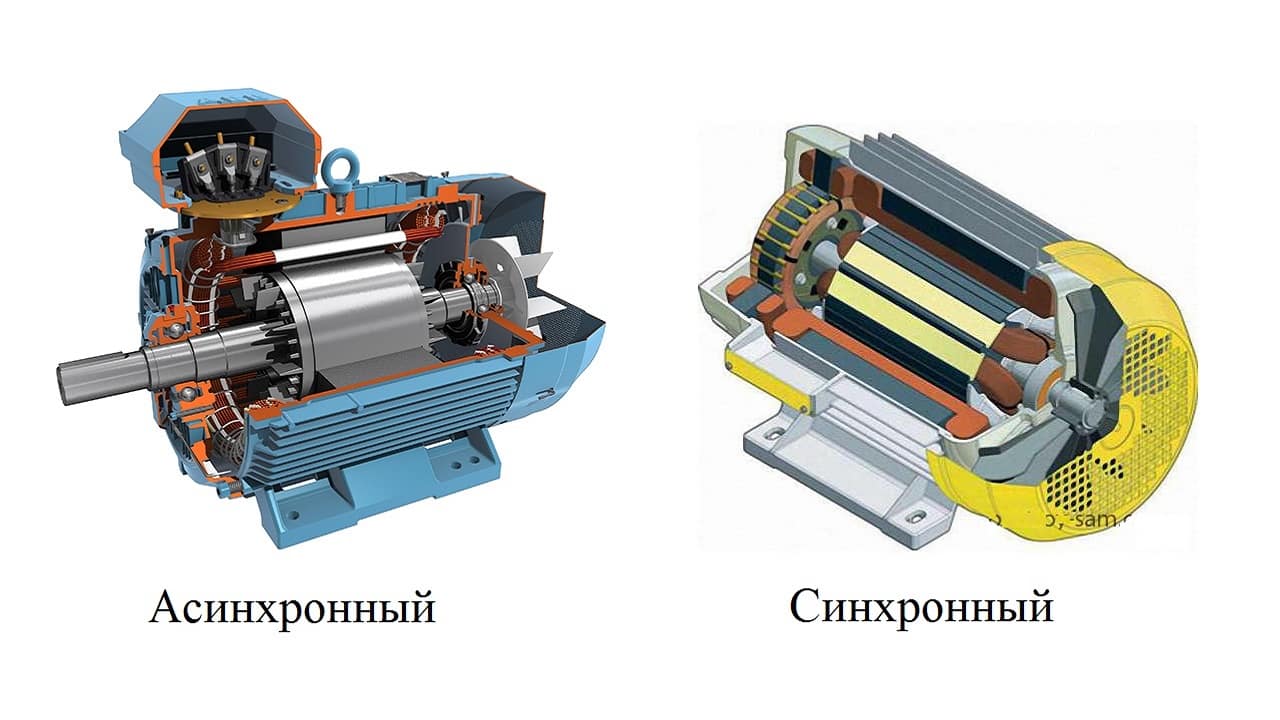 Рис. 4. Отличие асинхронного от синхронного электродвигателя
Рис. 4. Отличие асинхронного от синхронного электродвигателя
Эта обмотка создает магнитный поток, не зависящий от наличия электродвижущей силы в обмотках статора электродвигателя. Поэтому при возбуждении синхронного электродвигателя его вал начинает вращаться одновременно с полем статора. В отличии от асинхронного типа, где существует разница в движении, которая физически выражается как скольжение и рассчитывается по формуле:
где s – это величина скольжения, измеряемая в процентах, n1 – частота, с которой вращается поле статора, n2 – частота, с которой вращается ротор.
Синхронные электродвигатели применяются в тех устройствах, где важно соблюдать высокую точность синхронизации подачи питания и начала движения. Также они обеспечивают сохранение рабочих характеристик в момент пуска.
На практике существует огромное количество разновидностей асинхронных электродвигателей, отличающихся как сферой применения, так и мощностью согласно ГОСТ 12139-84 . В связи с тем, что все вариации перечислить невозможно, мы рассмотрим наиболее значимые критерии, по которым асинхронные аппараты разделяются на виды.
По количеству питающих фаз выделяют:
- трехфазные – используются в сетях, где есть возможность подключиться сразу ко всем фазам, но в частных случаях могут запускаться и в однофазной сети;
- двухфазные – применяются во многих бытовых приборах, состоят из двух рабочих обмоток, одна из которых питается напряжением сети, а вторая подключается через фазосдвигающий конденсатор.
- однофазные – как и предыдущая модель содержат две обмотки, одна из которых рабочая, а вторая пусковая.
По типу ротора различают:
- с короткозамкнутым ротором – имеет тяжелый пуск, но и меньшую стоимость;
- с фазным ротором – на роторе устанавливается вспомогательная обмотка, делающая работу электродвигателя более плавной.
 Рисунок 5: асинхронный двигатель с короткозамкнутым и с фазным ротором
Рисунок 5: асинхронный двигатель с короткозамкнутым и с фазным ротором
По способу подачи питания:
- статорные – классические модели, в которых рабочие обмотки устанавливают на статор;
- роторные – рабочие обмотки помещаются на вращающемся элементе, широкое применение на практике получили асинхронные двигатели Шраге-Рихтера.
Способы пуска и схемы подключения
Асинхронный электродвигатель с короткозамкнутым ротором обладает низкой себестоимостью, большими пусковыми токами и низким усилием на старте. Поэтому для различных целей могут применять различные способы пуска, снижающие бросок тока в обмотках и улучшающие рабочие характеристики:
- прямой – напряжение на электродвигатель подается через пускатели или контакторы;
- переключение схемы соединения обмоток электродвигателя со звезды на треугольник;
- понижение напряжения;
- плавный пуск;
- изменение частоты питающего напряжения.
Однофазного асинхронного двигателя.
Для асинхронного однофазного электродвигателя могут использоваться три основных способа пуска:
- С расщеплением полюсов – используется в электродвигателях особой конструкции, но недостатком методы является постоянная потеря мощности.

- С конденсаторным пуском – вводит пусковой конденсатор в момент запуска асинхронного двигателя и убирает его со схемы через несколько секунд после начала работы. Обладает максимальным вращательным моментом.
- С резисторным пуском электродвигателя – обеспечивает начальный сдвиг между векторами ЭДС обмоток для скольжения в асинхронной машине.

Трехфазного асинхронного двигателя.

Трехфазные асинхронные агрегаты могут подключаться такими способами:
- Напрямую в цепь через пускатель или контактор, что обеспечивает простоту процесса, но формирует максимальные токи. Этот способ не подходит в случае больших механических нагрузок на вал.
- Переключением схемы со звезды на треугольник – применяется для снижения токов в обмотках электродвигателя за счет уменьшения питающего напряжения с линейного на фазное.
- Путем подключения через преобразователь напряжения, реостаты или автотрансформатор для снижения разности потенциалов. Также используется изменение числа пар полюсов, частоты питающего напряжения и прочие.
Помимо этого трехфазные асинхронные двигатели могут использовать прямую и реверсивную схему включения в цепь. Первый вариант применяется только для вращения вала электродвигателя в одном направлении. В реверсивной схеме можно переключать движение рабочего органа в прямом и обратном направлении.
 Рис. 9: прямая схема без возможности реверсирования
Рис. 9: прямая схема без возможности реверсирования
Рассмотрим нереверсивную схему пуска асинхронного электродвигателя (рисунок 9). Здесь, через трехполюсный автомат QF1 питание подается на пускатель KM1. При нажатии кнопки SB2 произойдет подача напряжения на обмотки электродвигателя, его остановка осуществляется кнопкой SB1. Тепловое реле KK1 применяется для контроля температуры нагрева, а лампочка HL1 сигнализирует о включенном состоянии контактора.
 Рисунок 10: схема прямого включения с реверсом
Рисунок 10: схема прямого включения с реверсом
Реверсивная схема (смотрите рисунок 10) устроена аналогичным образом, но в ней используются два пускателя KM1 и KM2. Прямое включение асинхронного электродвигателя производиться кнопкой SB2, а обратное SB3.
Применение
Область применения асинхронных электродвигателей охватывает достаточно большой сегмент хозяйственной деятельности человека. Поэтому их можно встретить в различных типах станочного оборудования – токарных, шлифовальных, фрезерных, прокатных и т.д. В работе грузоподъемных кранов, талей, тельферов и прочих механизмов.
Их используют для лифтов, горнодобывающей техники, землеройного оборудования, эскалаторов, конвейеров. В быту их можно встретить в вентиляторах, микроволновках, хлебопечках и прочих вспомогательных устройствах. Такая популярность асинхронных электродвигателей обусловлена их весомыми преимуществами.
Преимущества и недостатки
К преимуществам асинхронных электродвигателей, в сравнении с другими типами электрических машин следует отнести:
- Относительно меньшая стоимость, в сравнении с другими типами электродвигателей, за счет простоты конструкции;
- Высокая степень надежности, благодаря отсутствию вспомогательных элементов редко выходят со строя;
- Способны выносить кратковременные перегрузки;
- Могут включаться в цепь напрямую без использования дополнительного оборудования;
- Низкие затраты на содержание в ходе эксплуатации.
Основными недостатками асинхронного электродвигателя являются относительно большие пусковые токи и слабый пусковой момент, что в определенной степени ограничивает сферу прямого включения. Также асинхронные электродвигатели обладают низким коэффициентом мощности и сильно зависят от параметров питающего напряжения.







