- Подключение моторчика к Ардуино
- Управление двигателем на Ардуино
- Как подключить моторчик к Arduino
- Скетч. Подключение мотора напрямую
- Пояснения к коду:
- Скетч. Подключение мотора через транзистор
- Пояснения к коду:
- Скетч. Подключение мотора через драйвер
- Arduino и использование двигателей. Подключение двигателя постоянного тока и управление им.
- 1. Управляем маленькими моторчиками
- Подсоединение моторчика:
- Arduino — двигатель постоянного тока
- Необходимые компоненты
- Процедура
- Меры предосторожности
- Spin ControlArduino Code
- Код для заметки
- Результат
- Контроль скорости двигателя
- Arduino Code
- Код для заметки
- Результат
- Контроль направления вращения
- Необходимые компоненты
- Процедура
- Шаги подключения
- Arduino Code
- Результат
- Подключение шагового двигателя к Ардуино
- Принцип работы шагового двигателя
- Драйвер шагового двигателя Ардуино
- Как подключить шаговый двигатель к Ардуино
Подключение моторчика к Ардуино

Подключение мотора к Ардуино ► потребуется при сборке машинки или катера. Рассмотрим различные варианты подключения коллекторного двигателя к Arduino.
Подключение мотора постоянного тока к Ардуино (коллекторного двигателя) требуется при сборке машинки или катера на микроконтроллере Arduino. Рассмотрим различные варианты подключения двигателей постоянного тока: напрямую к плате, через биполярный транзистор, а также с использованием модуля L298N. В обзоре размещены схемы подключения и коды программ для всех перечисленных вариантов.
Управление двигателем на Ардуино
Коллекторный моторчик может быть рассчитан на разное напряжения питания. Если двигатель работает от 3-5 Вольт, то можно моторчик подключать напрямую к плате Ардуино. Моторы для машинки с блютуз управлением, которые идут в комплекте с редукторами и колесами рассчитаны уже на 6 Вольт и более, поэтому ими следует управлять через полевой (биполярный) транзистор или через драйвер L298N.
Принцип работы и устройство мотора постоянного тока
На схеме показано устройство моторчика постоянного тока и принцип его работы. Как видите, для того, чтобы ротор двигателя начал крутиться к нему необходимо подключить питание. При смене полярности питания, ротор начнет крутиться в обратную сторону. Драйвер двигателей L298N позволяет инвертировать направление вращения мотора fa 130, поэтому его удобнее использовать в своих проектах.
Как подключить моторчик к Arduino
Для этого занятия нам потребуется:
- плата Arduino Uno / Arduino Nano / Arduino Mega;
- мотор постоянного тока (Motor DC);
- транзистор полевой/биполярный;
- драйвер двигателей L298N;
- провода «папа-папа», «папа-мама».
Перед выбором способа управления двигателем от Arduino Uno r3, уточните на какое напряжение рассчитан ваш моторчик. Если питание требуется более 5 Вольт, то следует использовать транзистор или драйвер. Распиновка транзисторов может отличаться от приведенного примера (следует уточнить распиновку для своего типа). Драйвер L298N позволит не только включать мотор, но и изменять направление вращения.
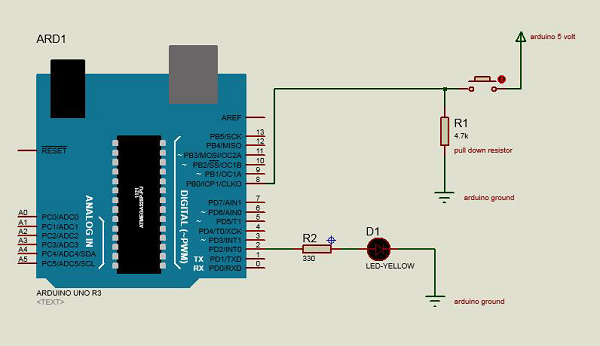
Скетч. Подключение мотора напрямую
Подключение мотора к Ардуино напрямую — самый простой вариант включения вентилятора на Arduino или машинки. Команда для включения двигателя не отличается, от команды при подключении светодиода к микроконтроллеру. Функция digitalWrite включает/выключает подачу напряжения на цифровой порт, к которому подключен двигатель постоянного тока. Соберите схему и загрузите программу.
Пояснения к коду:
- для подключения мотора без драйвера можно использовать любой порт;
- если двигатель не включается, то, возможно, не хватает силы тока на цифровом выходе, подключите двигатель через транзистор к порту 3,3V или 5V.
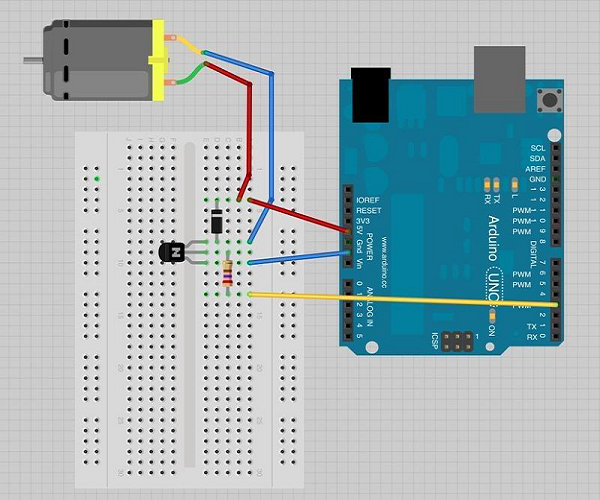
Скетч. Подключение мотора через транзистор
Подключение мотора через транзистор к Ардуино потребуется, если двигатель никак не хочет включаться от платы напрямую, то следует использовать порт 5 Вольт на микроконтроллере или внешний источник питания. Транзистор будет играть роль ключа, замыкая/размыкая электрическую цепь. Сам транзистор управляется цифровым портом. Соберите схему, как на картинке и загрузите программу.
Подключение FA-130 мотора постоянного тока — Motor DC Arduino
Пояснения к коду:
- при необходимости можно подключить два мотора FA-130 к Ардуино;
- в зависимости от характеристик, двигатель подключается к 3,3 или 5 Вольтам.
Скетч. Подключение мотора через драйвер
Подключение мотора к Ардуино через драйвер L298N или Motor Shield L293D позволит менять направление вращения ротора. Но для использования данных модулей потребуется установить соответствующие библиотеки для Ардуино. В примере мы использовали схему подключения двигателя с помощью модуля L298N. Соберите схему, как на картинке ниже и загрузите следующий скетч с использованием.
Arduino и использование двигателей. Подключение двигателя постоянного тока и управление им.
1. Управляем маленькими моторчиками
Управление маленьким двигателем может осуществляться довольно просто. Если двигатель достаточно маленький, он может быть непосредственно соединен с выводом Arduino, и просто изменяя уровень управляющего сигнала от логической единицы до нуля будем контролировать моторчик. Этот проект раскроет вам основную логику в управлении электродвигателем; однако, это не является стандартным способом подключения двигателей к Arduino. Мы рекомендуем, вам изучить данный способ, а затем перейти на следующую ступень — заняться управлением двигателями при помощи транзисторов.
Подключим миниатюрный вибромоторчик к нашему Arduino.
- обычный Ардуино, подключенный к USB-порту компьютера
- Резистор на 220 Ом
Миниатюрный вибромоторчик (можно найти в старой ненужной мобилке, или в магазине электроники)
Подсоединение моторчика:
1. У вибромоторчика есть два провода питания. Соедините один его провод с нулевым выводом (GND) питания контроллера. Не имеет значения какой из двух проводов.
2. Подключите резистор между выбранным дискретным выходом контроллера и оставшимся неподключенным проводом моторчика. Подключение резистора ограничит ток и гарантирует нам целостность и сохранность Ардуины, так как она не проектировалась для прямого контроля электродвигателями без преобразователей.
Приводим схему, где для мотора выбран второй дискретный вывод платы контроллера:

А вот примеры, как всё можно соединить при помощи макетной платы:
Arduino — двигатель постоянного тока
В этой главе мы будем связывать различные типы двигателей с платой Arduino (UNO) и покажем вам, как подключить двигатель и управлять им с вашей платы.
Есть три разных типа двигателей —
- Двигатель постоянного тока
- Серводвигатель
- Шаговый двигатель
Двигатель постоянного тока (двигатель постоянного тока) является наиболее распространенным типом двигателя. Двигатели постоянного тока обычно имеют только два провода, один положительный и один отрицательный. Если вы подключите эти два провода напрямую к аккумулятору, двигатель будет вращаться. Если вы переключите провода, двигатель будет вращаться в противоположном направлении.

Предупреждение. Запрещается приводить двигатель в движение непосредственно от выводов платы Arduino. Это может повредить доску. Используйте схему драйвера или IC.
Мы разделим эту главу на три части —
- Просто сделай мотор крутится
- Контроль скорости двигателя
- Контролировать направление вращения двигателя постоянного тока
Необходимые компоненты
Вам понадобятся следующие компоненты —
- 1x Arduino UNO доска
- 1x PN2222 Транзистор
- 1x малый 6В постоянного тока
- 1x 1N4001 диод
- 1x 270 Ом Резистор
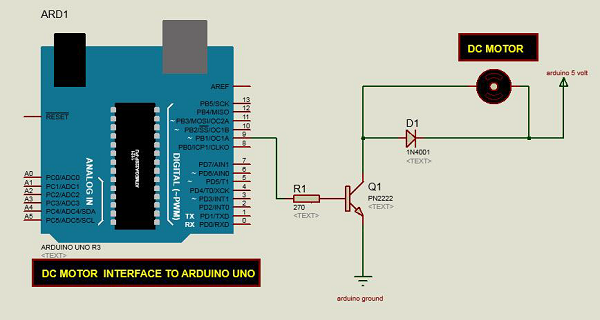
Процедура
Следуйте электрической схеме и выполните соединения, как показано на рисунке ниже.
Меры предосторожности
При подключении соблюдайте следующие меры предосторожности.
Сначала убедитесь, что транзистор подключен правильно. Плоская сторона транзистора должна быть обращена к плате Arduino, как показано на схеме.
Во-вторых, полосатый конец диода должен быть направлен к линии питания + 5 В в соответствии с расположением, показанным на рисунке.
Сначала убедитесь, что транзистор подключен правильно. Плоская сторона транзистора должна быть обращена к плате Arduino, как показано на схеме.
Во-вторых, полосатый конец диода должен быть направлен к линии питания + 5 В в соответствии с расположением, показанным на рисунке.
Spin ControlArduino Code
Код для заметки
Транзистор действует как переключатель, управляющий питанием двигателя. Контакт 3 Arduino используется для включения и выключения транзистора, и на эскизе ему присваивается название «motorPin».
Результат
Двигатель будет вращаться на полной скорости, когда вывод Arduino № 3 поднимется высоко.
Контроль скорости двигателя
Ниже приведена принципиальная схема двигателя постоянного тока, подключенного к плате Arduino.
Arduino Code
Код для заметки
Транзистор действует как переключатель, управляющий мощностью двигателя. Контакт 3 Arduino используется для включения и выключения транзистора, и на эскизе ему присваивается название «motorPin».
Когда программа запускается, она предлагает вам ввести значения для управления скоростью двигателя. Вам необходимо ввести значение от 0 до 255 в Serial Monitor.
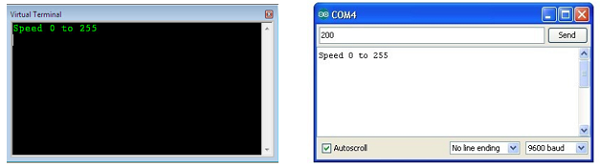
В функции «loop» команда «Serial.parseInt» используется для считывания числа, введенного в виде текста в Serial Monitor, и преобразования его в «int». Вы можете ввести любой номер здесь. Оператор ‘if’ в следующей строке просто выполняет аналоговую запись с этим номером, если число находится в диапазоне от 0 до 255.
Результат
Двигатель постоянного тока будет вращаться с различными скоростями в соответствии со значением (от 0 до 250), полученным через последовательный порт.
Контроль направления вращения
Для управления направлением вращения двигателя постоянного тока без замены проводов можно использовать схему, называемую H-мостом . H-мост — это электронная схема, которая может управлять двигателем в обоих направлениях. H-мосты используются во многих различных приложениях. Одним из наиболее распространенных приложений является управление двигателями в роботах. Он называется H-мостом, потому что он использует четыре транзистора, соединенных таким образом, что принципиальная схема выглядит как «H».
Мы будем использовать L298 H-Bridge IC здесь. L298 может контролировать скорость и направление двигателей постоянного тока и шаговых двигателей, а также может управлять двумя двигателями одновременно. Его текущий рейтинг составляет 2А для каждого двигателя. Однако при таких токах вам необходимо использовать радиаторы.
Необходимые компоненты
Вам понадобятся следующие компоненты —
- 1 × L298 мостовая ИС
- 1 × двигатель постоянного тока
- 1 × Arduino UNO
- 1 × макет
- 10 × перемычек
Процедура
Ниже приведена принципиальная схема интерфейса двигателя постоянного тока с платой Arduino Uno.
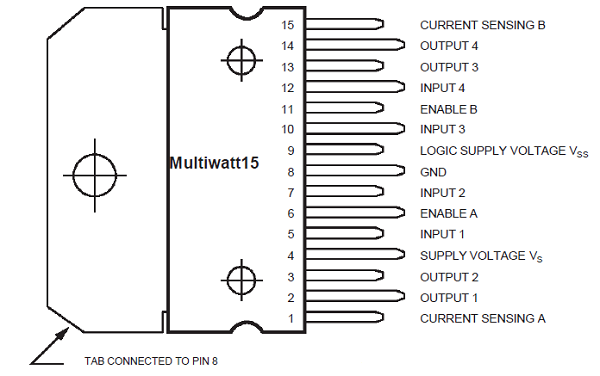
На схеме выше показано, как подключить микросхему L298 для управления двумя двигателями. Для каждого двигателя имеется три входных контакта: Вход1 (IN1), Вход2 (IN2) и Разрешить1 (EN1) для Двигателя1 и Вход3, Вход4 и Разрешить2 для Двигателя2.
Поскольку в этом примере мы будем управлять только одним двигателем, мы подключим Arduino к IN1 (контакт 5), IN2 (контакт 7) и Enable1 (контакт 6) микросхемы L298. Контакты 5 и 7 являются цифровыми, т. Е. Входы ВКЛ или ВЫКЛ, а для вывода 6 требуется сигнал с широтно-импульсной модуляцией (ШИМ) для контроля скорости двигателя.
В следующей таблице показано направление вращения двигателя на основании цифровых значений IN1 и IN2.
| В 1 | IN2 | Мотор Поведение |
|---|---|---|
| ТОРМОЗНАЯ | ||
| 1 | ВПЕРЕД | |
| 1 | BACKWARD | |
| 1 | 1 | ТОРМОЗНАЯ |
Контакт IN1 микросхемы L298 подключен к контакту 8 Arduino, а IN2 подключен к контакту 9. Эти два цифровых контакта Arduino контролируют направление двигателя. EN Контакт IC подключен к выводу 2 ШИМ Arduino. Это будет контролировать скорость двигателя.
Чтобы установить значения выводов Arduino 8 и 9, мы использовали функцию digitalWrite (), а для установки значения вывода 2 мы должны использовать функцию analogWrite ().
Шаги подключения
- Подключите 5V и заземление IC к 5V и заземлению Arduino соответственно.
- Подключите двигатель к контактам 2 и 3 микросхемы.
- Подключите IN1 IC к контакту 8 Arduino.
- Подключите IN2 IC к контакту 9 Arduino.
- Подключите EN1 IC к контакту 2 Arduino.
- Подключите SENS A контакт IC к земле.
- Подключите Arduino с помощью USB-кабеля Arduino и загрузите программу в Arduino с помощью программного обеспечения Arduino IDE.
- Подайте питание на плату Arduino с помощью блока питания, аккумулятора или USB-кабеля.
Arduino Code
Результат
Двигатель будет сначала вращаться в направлении по часовой стрелке (CW) в течение 3 секунд, а затем в течение 3 секунд против часовой стрелки (CCW).
Подключение шагового двигателя к Ардуино
Шаговый двигатель 28byj-48 Arduino ► предназначен для перемещения объекта на заданное количество шагов вала. Рассмотрим управление шаговым двигателем от Ардуино
Шаговый двигатель (stepper motor) предназначен для точного позиционирования или перемещения объекта на заданное количество шагов вала. Плата Arduino может управлять шаговым двигателем с помощью драйвера и библиотеки stepper.h или accelstepper.h. Рассмотрим принцип работы и схему подключения шагового двигателя к Arduino Uno / Nano, а также разберем скетч для управления шаговым мотором.
Принцип работы шагового двигателя
В зависимости от конструкции, сегодня применяются три вида шаговых двигателей: с постоянным магнитом, с переменным магнитным сопротивлением и гибридные двигатели. У двигателей с постоянным магнитом число шагов на один оборот вала доходит до 48, то есть один шаг соответствует повороту вала на 7,5°. Гибридные двигатели обеспечивают не меньше 400 шагов на один оборот (угол шага 0,9°).
Фото. Устройство шагового мотора в разрезе
Подсчитав количество сделанных шагов, можно определить точный угол поворота ротора. Таким образом, шаговый двигатель является сегодня идеальным приводом в 3D принтерах, станках с ЧПУ и в другом промышленном оборудовании. Это лишь краткий обзор устройства и принципа работы stepper motor, нас больше интересует, как осуществляется управление шаговым двигателем с помощью Ардуино.
Драйвер шагового двигателя Ардуино
Шаговый двигатель — это бесколлекторный синхронный двигатель, как и все двигатели, он преобразует электрическую энергию в механическую. В отличие от двигателя постоянного тока в которых происходит вращение вала, вал шаговых двигателей совершает дискретные перемещения, то есть вращается не постоянно, а шагами. Каждый шаг вала (ротора) представляет собой часть полного оборота.
Фото. Виды драйверов для управления шаговым двигателем
Вращение вала двигателя осуществляется с помощью сигнала, который управляет магнитным полем катушек в статоре драйвера. Сигнал генерирует драйвер шагового двигателя. Магнитное поле, возникающее при прохождении электрического тока в обмотках статора, заставляет вращаться вал, на котором установлены магниты. Количество шагов задаются в программе с помощью библиотеки Arduino IDE.
Схема подключения шагового двигателя 28BYJ-48 к Arduino Uno через драйвер ULN2003 изображена на рисунке ниже. Основные характеристики мотора 28BYJ-48: питание от 5 или 12 Вольт, 4-х фазный двигатель, угол шага 5,625°. Порты драйвера IN1 — IN4 подключаются к любым цифровым выводам платы Arduino Mega или Nano. Светодиоды на модуле служат для индикации включения катушек двигателя.
Как подключить шаговый двигатель к Ардуино
Для этого занятия нам потребуется:
- плата Arduino Uno / Arduino Nano / Arduino Mega;
- драйвер шагового двигателя ULN2003;
- шаговый двигатель 28BYJ-48;
- провода «папа-мама».







