- 4WS — 4 управляемых колеса
- IT News
- Система четырехколесного руления (4WS)
- Два колеса против четырех
- Как 4 КР поворачивают колеса
- Смена полосы движения
- Рулевое колесо и система 4 WS
- «4 поворотных колеса»: история и развитие системы 4WS
- Четыре на четыре: зачем современным машинам задние подруливающие колеса
- Зачем нужна управляемость
- Как машина поворачивает
- Не только управлением
- Первые полноуправляемые легковушки
- Почему снова появляются полноуправляемые шасси
4WS — 4 управляемых колеса
Первые полноуправляемые версии, что появились среди модификаций автомобилей Honda Prelude в 1987 году, снабжались механической системой с хитроумной кинематической связью между рулевыми рейками передних и задних колес. Кстати, тогда же на японском рынке произошел настоящий полноуправляемый бум: Mitsubishi Galant и Sigma, Mazda 626, а два года спустя и Toyota Celica — все обзавелись версиями с управляемыми задними колесами.
Применение систем управления всеми четырьмя колесами преследует три цели. Первая — получить переменную чувствительность автомобиля к повороту руля. Ведь при тихой езде по городским улочкам лучше иметь «острое» рулевое управление— чтобы не накручивать баранкой при каждом маневре. А на автостраде «острый» руль может вызвать проблемы — машина будет слишком резко реагировать даже на небольшие подруливания. Вторая цель — улучшить маневренность автомобиля при парковке или развороте в стесненных городских условиях, то есть уменьшить радиус поворота. И третья — повысить курсовую устойчивость при резких маневрах на высокой скорости.
Нынешняя система 4WS (4 Wheel Steer, то есть 4 управляемых колеса), устанавливаемая по заказу на купе Honda Prelude 2,2 VTi, является развитием предыдущей электронноуправляемой системы, которая в 1991 году сменила механическую. Задние колеса здесь поворачиваются с помощью специального рулевого механизма с электроприводом, встроенного в довольно сложную заднюю подвеску. А управляет им специальный электронный блок, который получает от нескольких датчиков информацию о скорости автомобиля, об угле поворота руля, передних и задних колес автомобиля и т. д.
Работает система 4WS в двух режимах. На малой скорости задние колеса поворачиваются в сторону, противоположную передним, и при маневре той же кривизны руль нужно будет вращать на меньший угол. То есть чувствительность рулевого управления будет выше, а вдобавок автомобиль станет более маневренным. К примеру, при развороте передние колеса будут вывернуты до упора влево, а задние — вправо на угол до восьми градусов. Радиус разворота при этом уменьшится на 15% по сравнению с обычным автомобилем и составит всего 4,7 метра!
А при движении на большой скорости — в быстром вираже или при перестроении из ряда в ряд на автостраде, — задние колеса с помощью системы 4WS, наоборот, будут поворачиваться на небольшой угол в ту же сторону, что и передние.

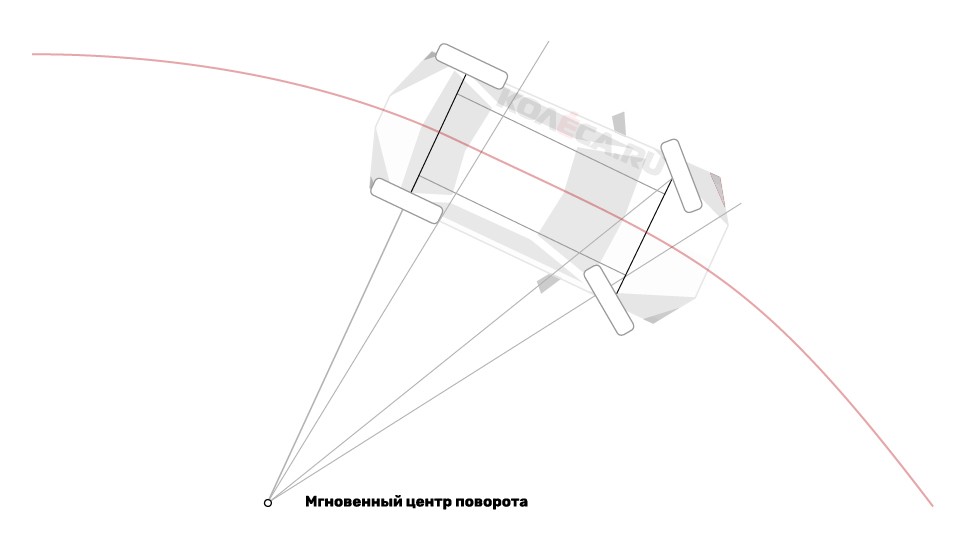
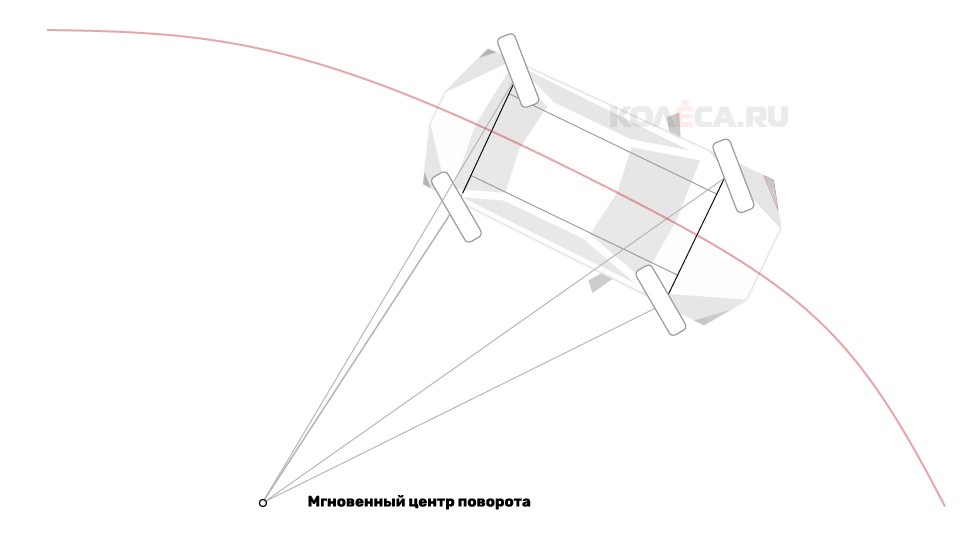
4WS: Поворот задних колес в ту же сторону, что и передних, позволяет сохранить направление и скорость движения центра масс автомобиля, но значительно увеличить мгновенный радиус поворота. При этом уменьшаются действующие на автомобиль боковые силы и, как следствие, повышается курсовая устойчивость
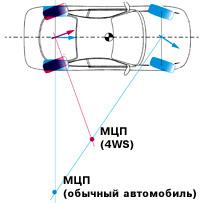
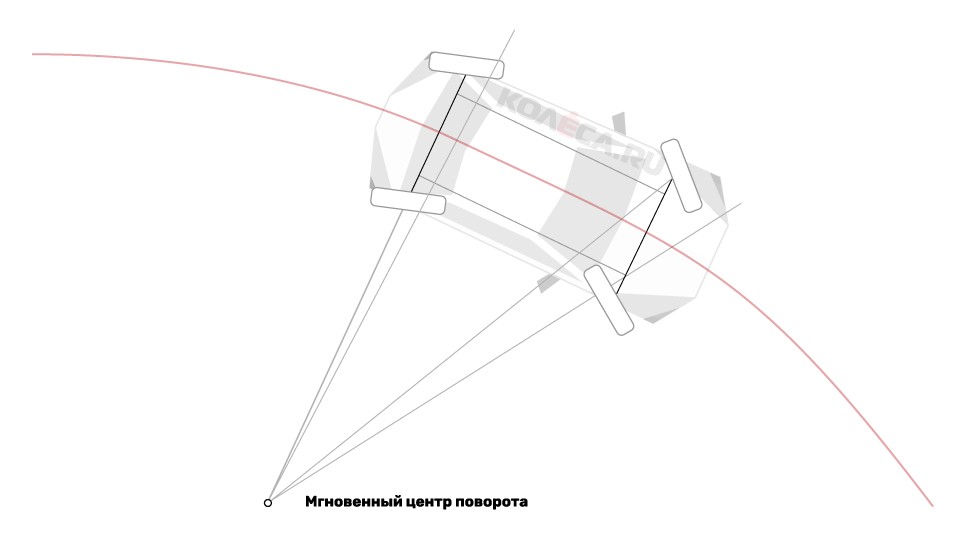
4WS: При движении на малой скорости задние колеса поворачиваются в противофазе с передними, и мгновенный радиус поворота уменьшается
МЦП — мгновенный центр поворота
К примеру, автомобиль, совершая маневр на автостраде, будет словно не поворачивать, а «переходить» из ряда в ряд параллельно полосам разметки. Что это даст? Машина будет двигаться по дуге меньшей кривизны и большего радиуса. Момент, поворачивающий машину вокруг вертикальной оси, будет меньше — стало быть, уменьшится и риск потери курсовой устойчивости и развития заноса задней оси
IT News
Last update Вс, 29 Янв 2017 11pm
Система четырехколесного руления (4WS)

Когда водители управляют обычным автомобилем, они поворачивают рулевое колесо, и вслед этому движению передние колеса меняют свое направление — в то время как задние колеса постоянно направлены прямо вперед.
Такова стандартная система, называемая «двухколесное руление» или, сокращенно, 2 WS. Однако некоторые фирмы сейчас выпускают автомобили с четырехколесным рулением (4 WS). Системы 4 WS разных фирм отличаются друг от друга, но в большинстве из них задние колеса поворачиваются в ту же сторону, что и передние, если автомобиль делает вираж на большой скорости. На малых скоростях направление поворота задних колес при 4 КР противоположно направлению поворота передних. Такая особенность позволяет, в частности, совершать более крутые повороты, что полезно при движении по городу или при парковке в тесных местах. Дорожные испытания систем 4 WS показали, что подобные системы обеспечивают большую безопасность движения. И все же четырехколесное руление не получило пока еще широкого распространения. Из-за того, что стоимость системы 4 WS, по мнению водителей, не оправдывает получаемых с ее помощью преимуществ.
Два колеса против четырех

В 2 КР автомобилях (внизу слева) поворачиваются лишь передние колеса. Если же меняет направление движения 4 КР автомобиль, то могут поворачиваться все четыре колеса (справа).
Как 4 КР поворачивают колеса

Допустим, две машины: 2 КР (голубая) и 4 КР (желтая на рисунке над текстом) начинают с одного места (зеленого) делать медленный крутой поворот. Благодаря повороту задних колес машина 4 КР поворачивает круче машины 2 КР и, значит, ей требуется меньше места для поворота.

Если эти две машины будут совершать плавный широкий поворот (как показано на правом рисунке), то все колеса машины 4 КР идут, как говорят, колея в колею, и таким образом обеспечивается более надежное сцепление колес с дорожным полотном.
Смена полосы движения

Если водитель перестраивается в другую полосу на скоростном шоссе, то у 2 КР автомобиля проявляется «эффект рыбьего хвоста»: его заднюю часть заносит, потому что задние колеса стремятся идти по старому направлению. Чтобы исправить такое положение, водителю приходится дважды поворачивать рулевое колесо до смены полосы и дважды поворачивать его после смены полосы. У 4 КР автомобиля нет эффекта рыбьего хвоста.
Рулевое колесо и система 4 WS

чувствительные датчики в системе 4 КР следят за тем, насколько повернуто рулевое колесо и, следовательно, передние колеса в каждый момент времени (красная линия на рисунке). Когда угол поворота руля невелик (первые две колонки), система 4 КР оставляет задние колеса прямо или слегка разворачивает по направлению передних колес. При более резких поворотах — когда рулевое колесо делает более одного полного оборота (четвертая колонка) — система 4 КР поворачивает задние колеса в противоположную сторону.
«4 поворотных колеса»: история и развитие системы 4WS
Идея поворачивать с помощью все четырех колес, бродит в светлых умах инженеров еще начиная с 20-х годов прошлого века. Полноуправляемое шасси дает много преимуществ: автомобиль получается маневренным на низких скоростях и устойчивым на высоких. О трудностях и успехах в создании автомобилей с таким шасси я расскажу сегодня.
Первым автомобилем с поворотными задними колесами, принято считать американский грузовик Jeffery Quad, так же известный как Nash Quad . Созданный талантливым инженером Чарльзом Нэшем в 1913 году, он быстро завоевал популярность. Полноприводный, маневренный и с хорошей грузоподъемностью в 2 тонны, он как нельзя лучше подходил для службы в армии. Многие страны буквально выстраивались в очередь за этим грузовиком. Россия в 1915 году закупила около 30 автомобилей из которых в последствии были построены броневики.
В 1936 году Mercedes-Benz выпускает модель 170VL , в которой с помощью системы механических тяг, задние колеса могли поворачиваться уменьшая тем самым радиус поворота до 5 метров. Полноприводный 170VL, предназначался для нужд немецкой армии и был выпущен в количестве 500 штук.
Более современные механически-электронные системы начались разрабатываться только с 70-х, когда в 1973 году Министерство обороны США объявило о своем проекте ESV (Experimental Safety Vehicle), в рамках которого происходили поисковые работы на тему безопасного автомобиля будущего десятилетия. К программе подключились, множество автопроизводителей из 7 стран, в том числе и Япония.
Во время экспериментов, инженеры Honda определили, что выгоднее всего для обеспечения лучшей маневренности на малых скоростях поворачивать задние колеса в противоположную от передних сторону. А для большей устойчивости и безопасности на скоростях более 40 км/ч в ту же, что и передние. В 1981 году был создан первый прототип, который представлял собой две передние части Honda Accord соединенные в один автомобиль. Так была запатентована система управляемого шасси, которое получило название 4WS.
Впервые такая система, дебютировала 7 лет спустя, на Honda Prelude третьего поколения. Она была полностью механической. Оценив преимущества такого шасси, другие японские производители начинают также активно работать над аналогичными решениями. Так Mazda в 1990 году представляют свою модель MX-6 GT , в которой в отличие от Хонды задние колеса поворачивались с помощью гидравлики. Впоследствии многие японские производители стали предлагать в качестве опции полноуправлемое шасси и в 90-х годах казалось, что система 4WS пришла в серьез и надолго, но почему же ее не встретить на современных машинах?
А тут все довольно просто, несмотря на высокую надежность этих систем на японских машинах, потребители не желали переплачивать за 4WS и не видели большого преимущества в ней. И логику простых водителей можно понять, при движении на стандартных скоростях выгода от нее не так очевидна.
Но не стоит переживать, полноуправляемое шасси никуда не делось, а переместилось в более дорогой сегмент, где служит на благо управляемости таким спорткарам как Lamborghini Aventador и Porsche 911 GT3.
Друзья, если вам понравилась статья, ставьте лайк 👍 и подписывайтесь на канал, благодарю за поддержку)
Четыре на четыре: зачем современным машинам задние подруливающие колеса

Когда японские машины считались самыми-самыми продвинутыми, легенды доносили о том, что в Стране восходящего солнца есть машины, у которых поворачиваются все четыре колеса. Потом в суете обновок те времена как-то забылись. Бурное начало девяностых годов прошло, и в серийном производстве остались только самые нужные из технических решений той поры. Но сейчас интерес к полноуправляемым шасси снова растет, правда, уже на ином техническом уровне, без дополнительных рулевых валов и с заметно упростившейся задней подвеской.
И ладно бы только на Porsche 911 GT3 или Lamborghini Aventador — но ведь на обычном Renault Espace тоже внедряют поворачивающиеся задние колеса. В чем смысл такого технического решения, и ради чего шли на такие сложности производители? И почему о технологии забыли до недавнего времени?
Зачем нужна управляемость
Настройка управляемости всегда считалась очень сложной работой, а машины с идеальным балансом попадали в число лучших. Шасси современных машин, на первый взгляд, мало изменилось в сравнении с восьмидесятыми годами, но отличие есть. И оно отлично себя проявляет, если взглянуть на достигаемые машинами скорости на маневре «переставка» или на гоночной трассе.

Современный семейный хэтчбек способен опередить большую часть суперкаров тридцатилетней давности на автодроме, и не в последнюю очередь за счет тонкой настройки управляемости и отличной «цепкости» шасси. Конечно, и резина, и эластичность моторов тоже играют свою роль, но сейчас в первую очередь поговорим о геометрии.
Нет, речь вовсе не о школьном предмете — я про геометрию шасси. Это набор параметров, описывающих изменения в положении элементов шасси при изменении нагрузки. Суть фокуса в том, что при прохождении поворотов машина наклоняется, да и дорога имеет свой профиль. При правильном расчете параметров геометрии шасси покрышки всегда имеют оптимальный для данных условий контакт с дорогой.
Речь здесь не о максимальной прижимной силе, а о соотношении коэффициента сцепления колес передней и задней оси, правого и левого колес, и о способности колеса в каждый момент воспринимать нагрузку по трем направлениям.
Задача повысить площадь контакта колес с дорогой не так проста, как кажется.
Конечно же, можно «зажать» подвески и сделать перемещения меньше. Это полезно со многих точек зрения, и часто так и поступают, но ведь перемещения можно использовать для благого дела. Например, чтобы колеса в повороте поворачивались сами. Если сложно рассчитать перемещения, то можно немножко подыграть им, поставив рулевое управление и на заднюю ось, создав полноуправляемую машину.
А можно задать перемещение с помощью усложненной подвески — например, многорычажной, которая позволяет настраивать геометрию движения колеса в очень широких пределах и сохранять эти параметры при износе элементов длительное время.
Если вы не гонщик, это не означает, что управляемость для вас не важна. Просто в вашем случае этот термин означает совсем иной набор предпочтительных параметров, нежели идеальная точность и быстрота реакций. Собственно, активная безопасность машины во многом зависит от ее управляемости, и потому над этими параметрами конструкторы автомобилей работают много и продуктивно. А какое отношение это имеет к геометрии шасси?
Как машина поворачивает
Казалось бы, чего проще: повернул передние колеса — и машина повернула. Но на практике все заметно сложнее. Для начала даже на стоящей машине повернутся не только передние колеса. Поскольку у передней подвески есть угол кастора, то передние колеса при повороте поднимутся, каждое на свою высоту. На сколько — зависит от ширины и твердости резины, геометрии подвески и так далее.
Машина в результате получит некоторый крен, в зависимости от высоты центра крена передней и задней подвесок и положения центра масс в этот момент. Задние колеса или даже неразрезной задний мост тоже повернутся — просто в силу того, что при любом изменении положения кузова колеса не просто ходят вверх-вниз, а тоже чуточку, но поворачивают.
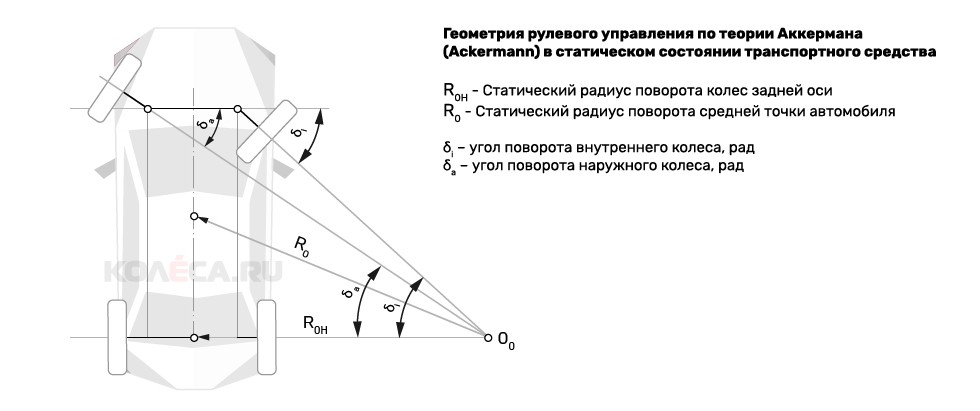
В динамике к этой куче параметров добавятся кренящий момент от центра масс машины и уводы резины. Среди всех параметров, которые необходимо рассчитать, для нас наибольшее значение будет иметь мгновенный центр поворота и радиусы поворота передней и задней осей и центра масс. Мгновенный центр поворота совсем не совпадает с геометрическим, который вычислен по правилу Аккермана – точкой, в которой находятся центры окружностей качения всех колес. Более того, в динамике такой точки просто не существует из-за скольжений. Но на рисунках для примера рассмотрена более простая ситуация, чтобы не наводить путаницы.
На первый взгляд, если доворачивать задние колеса в противоположную от передних сторону, то уменьшается радиус поворота машины. Это важно с точки зрения удобства эксплуатации и маневренности. Чем меньше радиус, тем удобнее. Но машины ездят не только на скоростях погрузчиков в торговом центре, так что приходится учитывать и другие факторы.
А что если поворачивать колеса в ту же сторону, что и передние? На первый взгляд, бессмыслица: машина «поедет боком» по большому радиусу, если задние колеса повернуты на меньший угол, чем передние. Сам по себе больший радиус поворота означает, что станет меньше перераспределение нагрузок между правыми и левыми колесами, а значит лучше сцепление колес с дорогой и комфорт.
Но, кажется, того же можно добиться, просто повернув руль на меньший угол? Можно это сделать даже автоматически — благо, рулевые механизмы с переменным шагом сейчас не редкость. Но при повороте задних колес в сторону поворота еще и уменьшается угол увода задней оси, а значит, и склонность к избыточной поворачиваемости. Если совсем просто – машина становится более устойчивой к возникновению заноса. На высоких скоростях это крайне важно.
Схожий эффект можно было бы получить простым увеличением колесной базы. Но размеры машин ограничены — зато с помощью изменения угла поворота задних колес можно получить желаемое, не увеличивая габаритов. А для короткобазной машины это просто спасение: можно сохранить сочетание устойчивости на дороге, характерное для больших машин, не отказываясь от хорошей поворачиваемости.
Не только управлением
Для устойчивости на дороге заднее колесо в повороте должно поворачиваться в сторону поворота передних, а для лучшей маневренности – в противоположную. Если с маневренностью особых сложностей нет, то можно использовать для доворота колес особенности движения машины в повороте. Например, наличие крена. При сжатии подвеска будет доворачивать колесо, и мы получим желаемое.
Но тут есть две проблемы. Во-первых, подвеска таким же образом реагирует на изменение нагрузки, а хотелось бы, чтобы управляемость меньше зависела от нагрузки и больше от собственно крена и боковых усилий. Во-вторых, на заднеприводных машинах очень соблазнительно привязать поворот колес к вектору тяги.
Если усложнять подвеску, вводя рычаги, которые воздействуют на углы установки колес при определенной нагрузке, то мы получим многорычажную подвеску. Да, ту самую, которая появилась на Mercedes W201 и сейчас применяется на большинстве машин С-класса и выше. Причем не только на задней оси, но и на передней.
Именно многорычажная подвеска позволила получить тот же эффект, что и принудительный поворот задней оси, и отказаться от применения сложных систем принудительного поворота на четверть века. Система рычагов в такой подвеске задает сложную траекторию движения колеса в зависимости от продольной, поперечной и вертикальной нагрузок.
Можно довольно точно настроить геометрию шасси с учетом того, как машина будет вести себя при появлении значительных боковых сил, при разном соотношении вертикальной и поперечной нагрузок. Для заднеприводных машин это оказалось серьезным подспорьем в борьбе за лучшую управляемость с самого начала, а переднеприводные примерили подобные технологии чуть позже, с ростом массы, нагрузок и требований уже к их управляемости.
Первые полноуправляемые легковушки
Машины с двумя управляемыми осями создавали вовсе не для отличной управляемости. Такие машины вообще не ездили по шоссе на большой скорости, потому что это были вездеходы. Например, знаменитый Unimog – универсальное шасси повышенной проходимости имеет все четыре управляемых колеса. Разумеется, для того, чтобы лучше ехать по бездорожью и маневрировать в ограниченном пространстве.
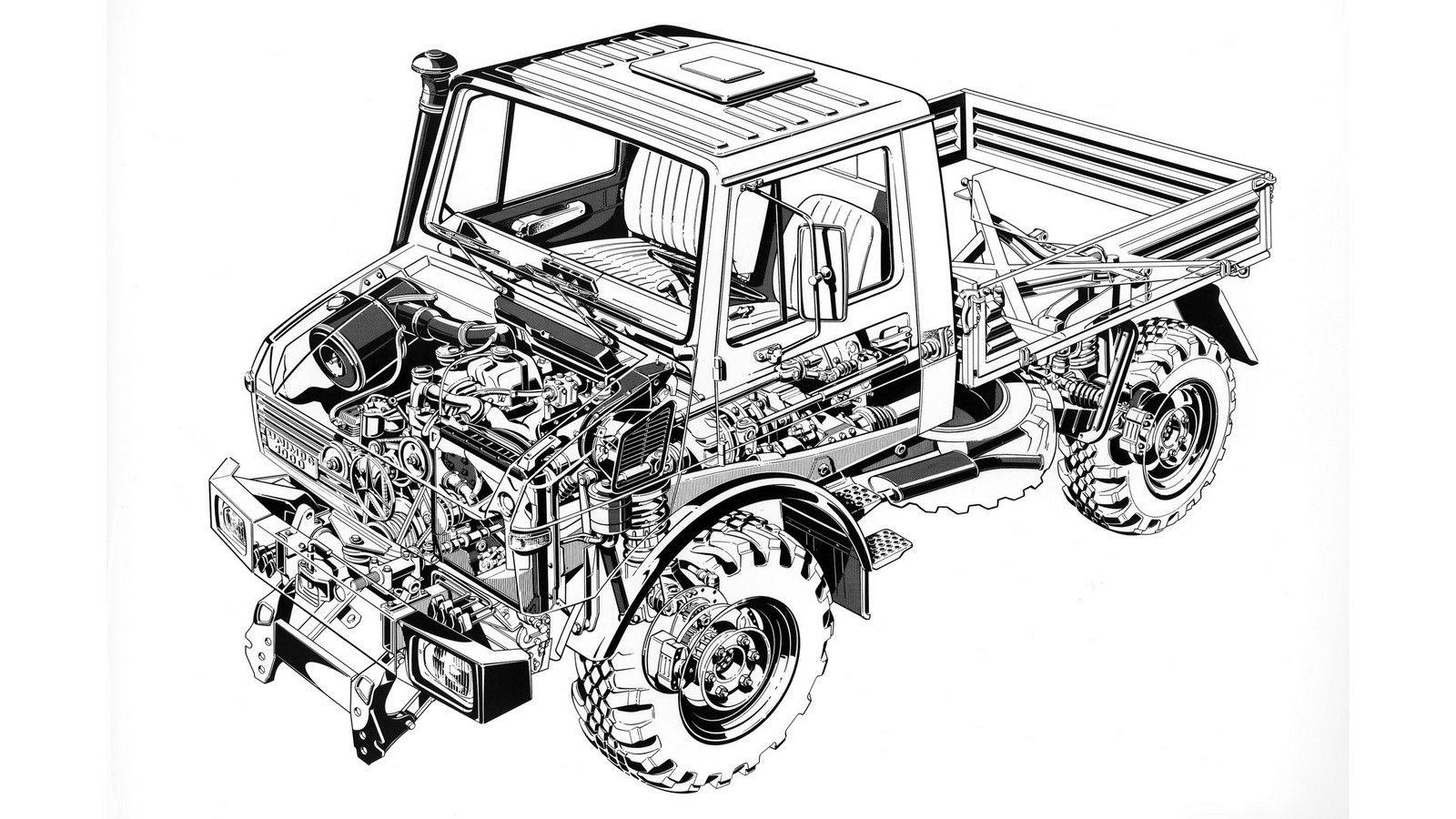
На фото: Mercedes-Benz Unimog U 1000
Японские машины начала 80-х годов по сложности конструкции недалеко от них ушли. На Honda Prelude 1987 года была задняя рулевая рейка и вал, связывающий ее с рулевым колесом, и система работала в зависимости от угла поворота колес. На малых углах поворота задние колеса поворачивались в ту же сторону, что и передние, а при больших — в противоположную. Даже в таком виде эффект оказался достаточным, чтобы подобную технологию внедрили и другие японские производители.

На фото: Honda Prelude 1987
Только на следующих поколениях привод задней рулевой рейки стал уже электрическим, а угол поворота зависел и от скорости, на которой совершался маневр. Впрочем, от валов и рейки избавиться не догадались. Конструкции оставались сложными, массивными, объемными и дорогими. Как итог — машины с ними не снискали особой популярности и продавались только на внутреннем японском рынке. Во всем остальном мире безоговорочное лидерство захватили многорычажные подвески.
Почему снова появляются полноуправляемые шасси
Самый очевидный ответ на этот вопрос — снижение цены на приводные механизмы и электронику управления и развитие систем устойчивости и безопасности. На новом технологическом уровне отказались от задних рулевых трапеций и реек. Многорычажные подвески обеспечивают уже достаточный угол доворота колес для реализации нужного эффекта. Осталось оснастить их вместо рычага, отвечающего за доворот колеса, активным электрическим или гидравлическим приводом.
Электроника куда точнее определяет, что происходит в данный момент с машиной, позволяет использовать большие углы доворота, и к тому же дешевле в настройке, чем сложная подвеска. И как дополнительный фактор – то самое улучшение поворачиваемости на малых скоростях. Можно довернуть колеса в противоположную сторону и улучшить маневренность машины на узких улочках.
Не удивлюсь, если подобные системы в ближайшее время будут массово внедряться на машинах от С-класса и выше, причем в сочетании с упрощенной геометрией задней подвески — например, не с многорычажками, а со скручиваемой балкой. Экономический смысл в этом определенно есть, ведь можно получить управляемость, как у более дорогих машин, при меньших затратах. Да и еще один сложный и дорогой изнашиваемый узел «лишним» не будет. Ведь производители авто, кажется, взяли обязательство сделать машину одноразовой.







