Асинхронный двигатель при неподвижном роторе





Асинхронный двигатель при неподвижном роторе
Асинхронный двигатель при неподвижном роторе. Между обмоткой статора и обмоткой Ротора асинхронной машины, как и у трансформатора между первичной обмоткой и вторичной обмоткой, имеется только магнитная связь. Электромагнитный процесс асинхронной машины подобен процессу, который происходит в трансформаторе. Такое сходство особенно заметно в режиме работы асинхронных машин со стационарными роторами, которые конструктивно отличаются только от трансформаторов обычной конструкции (наличие воздушных зазоров, распределенных обмоток статора и ротора и т. д.). В этом случае возможны 2 крайних режима работы-холостой ход и короткое замыкание. ( / , и частотой).
Первый может быть получен только на машине с фазным ротором, в которой обмотка Ротора разомкнута, а обмотка статора включена в трехфазную сеть с напряжением. Людмила Фирмаль
- В этом случае асинхронная машина представляет собой холостой трансформатор. Обмотка статора является первичной обмоткой, а обмотка Ротора-вторичной обмоткой. <Под действием Y ток разомкнутой цепи / ® протекает через каждую фазу статора winding. It воспитывается им. И Po создает поток, часть которого Ф (основной поток) объединяется в обе обмотки, а другая thep (рассеивающий поток) объединяется только в обмотки статора (рис.7).!это не. Главный Магнитный поток Φ, вращающийся со скоростью n0= -, индуцируется в обмотках статора и ротора e. d. S. равны, соответственно: (7.1) (7.2) ^ 1 = 4. 44b01yy1 ^ fm; ^ 2 = 4.44&2a1 / 1Fm、 Где yes и yes2-число витков последовательно по 1 фазе обмоток статора и ротора. ko и & o2-коэффициенты намотки обмоток статора и ротора.
Fm-максимум основного потока. Рассеянный поток Ф / М индуцируется в обмотке статора e. d. s Разброс-где x1 =2π^ p1-индукция 1 сопротивление рассеяния фазы обмотки статора. Рисунок 7.1.Статор течет с открытым ротором. Напишите уравнение напряжения для обмотки статора и первичной обмотки трансформатора 0 \ = E \ (rxK -\ -] X \ 1o = (7.3) Где r \ u-активное сопротивление и полное сопротивление фазы обмотки статора. Согласно формуле (7.3), падение напряжения n! Только значения O и / lg1 / 0 могут построить векторную диаграмму, которая отличается от диаграммы холостого хода трансформатора.
- Они обусловлены относительно высокими значениями открытого тока и тем, что асинхронная машина больше трансформатора. Относительно большое сопротивление n и X1.Ток разомкнутой цепи асинхронной машины из-за наличия пустот составляет 25-50% от I\. Коэффициент преобразования Э. Д. С. асинхронная машина _ & 01 & h Например, kochfg Только коэффициент коэффициента обмотки отличается от коэффициента давления трансформатора. В режиме холостого хода машины (n-0), помимо потерь статора и ротора из стали pc1_ | _pc2>и потери статора из меди rt1a2gi, t1 следует учитывать количество фаз обмотки статора. Покрытие представляет собой мощность P (b, потребляемую машиной от сети.
Подобный этому (7.5) Po-c1 \ P Людмила Фирмаль
- Данная обмотка Ротора означает обмотку с тем же числом фаз и витков, что и обмотка статора, и тем же коэффициентом намотки. 0.45 / P1/ 1 —-= 0.45 // 22 / g П K0 gt П В случае короткого замыкания асинхронного двигателя n пренебрежимо мало. А основной поток Φ мал из-за ПО и тока/ о. тогда, согласно закону равновесия, n. а статор и Ротор равны, то есть Или (7.6) = / П2Л0g / oi’RW2 ^ O2 ^ 2 Один (7.7) Отсюда Т, Л01ю1 А и Где k * = текущий коэффициент пересчета. tfogHyug T2-число фаз обмотки ротора. Согласно формуле (7.4), например, приведенными обмотками Ротора являются E2 ’= kEE2 = E <. (7.8) )=Г2кЕк1 = г2к. (7.9)) r2 ′ определяет и начинает с равенства m2 / 22r2 = m1 / 2/2r2/. Здесь к=кккх-коэффициент уменьшения сопротивления. hg ГГ ХД ’ гг $ при определении x





Изучу , оценю , оплатите , через 2-3 дня всё будет на «4» или «5» !
Откройте сайт на смартфоне, нажмите на кнопку «написать в чат» и чат в whatsapp запустится автоматически.


 f9219603113@gmail.com
f9219603113@gmail.com


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.9219603113.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Замещение вращающегося ротора неподвижным ротором.
На основании схемы замещения (рис.2.7) составим уравнение обмотки статора и ротора:
 (1)
(1)
 (2)
(2)
Здесь подчёркнутые  ,
,  ,
,  — комплексные значения.
— комплексные значения.
Перепишем уравнение (2) с учетом, что  :
:
 (3)
(3)
Поделив обе части уравнения (3) на s, получим:
 (4)
(4)
 В уравнении (4) Е2 и Х2 не зависят от s, но при этом появилось сопротивление (R2/s), которое изменяется в зависимости от скольжения. Уравнению (4) соответствует электрическая схема замещения обмотки ротора, показана на рис.2.8.
В уравнении (4) Е2 и Х2 не зависят от s, но при этом появилось сопротивление (R2/s), которое изменяется в зависимости от скольжения. Уравнению (4) соответствует электрическая схема замещения обмотки ротора, показана на рис.2.8.
Токи, полученные из уравнения (3) и (4) имеют одинаковые значения и одинаковые углы их сдвига по фазе относительно ЭДС:

Поэтому и потоки созданные этими токами, также будут одинаково ориентированы в пространстве. Отсюда следует, что замена вращающегося ротора эквивалентным неподвижным ротором не нарушает магнитное состояние двигателя.
Однако, схемы замещения на рис.2.7 и рис.2.8 в энергетическом отношении не эквивалентны: активная мощность в роторе, согласно схеме рис.2.7, равна электрическим потерям РЭ2 = m2R2I2 2 , а мощность, потребляемая ротором в схеме рис.2,8, Р12= m2
Суть в том, что Р12 есть полная активная электрическая мощность, передаваемая из статора в ротор электромагнитным путем, и она носит название электромагнитной мощности: Р12 = РЭМ. Часть этой мощности идет на покрытие электрических потерь в обмотке ротора (РЭ2 = m2R2I2 2 ), а оставшаяся часть соответствует полной механической мощности, которая получается в результате преобразования электрической энергии в механическую:

Таким образом, мощность, выделяемая в сопротивлениях  всех фаз обмотки ротора, равна механической мощности вращающегося двигателя.
всех фаз обмотки ротора, равна механической мощности вращающегося двигателя.
Величину  можно представить в виде
можно представить в виде  и записать уравнение для напряжений фазы обмотки неподвижного ротора, нагруженной на резистивное сопротивление:
и записать уравнение для напряжений фазы обмотки неподвижного ротора, нагруженной на резистивное сопротивление:
 .
.
Этому уравнению соответствует схема на рис.2.9.
 Для построения векторной диаграммы и эквивалентной схемы замещения параметры обмотки ротора приводят к обмотке статора так же, как в трансформаторе. При этом обмотку ротора с числом фаз n2, обмоточным коэффициентом к2 и числом витков фазы w2 необходимо заменить обмоткой с m1, к1, w1 и сохранить баланс мощностей и электрических потерь реальной и приведённой обмоток.
Для построения векторной диаграммы и эквивалентной схемы замещения параметры обмотки ротора приводят к обмотке статора так же, как в трансформаторе. При этом обмотку ротора с числом фаз n2, обмоточным коэффициентом к2 и числом витков фазы w2 необходимо заменить обмоткой с m1, к1, w1 и сохранить баланс мощностей и электрических потерь реальной и приведённой обмоток.
При приведении величин и параметров цепи ротора используют три коэффициента приведения:
 — коэффициент приведения токов,
— коэффициент приведения токов,
 — коэффициент приведения ЭДС
— коэффициент приведения ЭДС
 — коэффициент приведения сопротивлений.
— коэффициент приведения сопротивлений.
Для приведённой обмотки ротора:

Система уравнений АД с приведенным неподвижным ротором:

Уравнения при неподвижном роторе совпадают с уравнениями трансформатора. Схема замещения для одной фазы двигателя (рис.2.10а) так же будет подобна схеме замещения трансформатора. В количественном отношении параметры схемы замещения обмотки двигателя существенно отличаются от параметров схемы замещения трансформатора тем, что ток холостого хода и реактивные сопротивления фаз обмоток статора и ротора больше из-за наличия воздушного зазора, чем в трансформаторе.
 Векторная диаграмма АД строится на основе схемы замещения и будет аналогична векторной диаграмме трансформатора, отличаясь большим намагничивающим током и тем, что нагрузка является чисто резистивной Rmex, соответствующая механической мощности Рмех. На диаграмме токи холостого хода имеют большую величину.
Векторная диаграмма АД строится на основе схемы замещения и будет аналогична векторной диаграмме трансформатора, отличаясь большим намагничивающим током и тем, что нагрузка является чисто резистивной Rmex, соответствующая механической мощности Рмех. На диаграмме токи холостого хода имеют большую величину.
Для удобства изучения режимов работы АД Т-образную схему замещения двигателя представляют в виде Г-образной (с вынесенным намагничивающим контуром) как показано на рис.2.106.
В Г-образной схеме появляется коэффициент  . Для двигателя мощность 3кВт и более С1 = (1.05
. Для двигателя мощность 3кВт и более С1 = (1.05  1.02). Поэтому с целью облегчения анализа выражений и расчета принимаем С1 =1. Возникшие при этом погрешности не превысит (2 5)%.
1.02). Поэтому с целью облегчения анализа выражений и расчета принимаем С1 =1. Возникшие при этом погрешности не превысит (2 5)%.
Используя Г-образную схему замещения, легко определить ток ротора:


Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого.

Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим.

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰).
Замещение вращающегося ротора эквивалентным неподвижным
В АМ при вращающемся роторе происходит преобразование электрической энергии в механическую, если она работает двигателем. Частота тока в роторе отличается от частоты тока в обмотке статора.
АД при вращающемся роторе можно заменить эквивалентным ему по энергетическим и электромагнитным процессам двигателем при неподвижном роторе. При такой замене ток и его фаза в роторе и МДС ротора  должны оставаться неизменными.
должны оставаться неизменными.
Ток во вращающемся роторе при скольжении S
 . (1)
. (1)
ЭДС обмотки ротора:
 , (2)
, (2)
 ,
,
 . (3)
. (3)
Индуктивное сопротивление рассеяния:
 , (4)
, (4)
где  — индуктивное сопротивление рассеяния при неподвижном роторе.
— индуктивное сопротивление рассеяния при неподвижном роторе.
С учётом (3) и (4) запишем (1) в виде:
 . (5)
. (5)
Поделим числитель и знаменатель (5) на S, получим:
 . (6)
. (6)
Токи, полученные по уравнениям (5) и (6) одинаковое значение. Одинаковыми будут углы их сдвига от ЭДС:
 .
.
Однако между этими токами имеется принципиальное различие. Если ток  обусловлен ЭДС
обусловлен ЭДС  имеет частоту
имеет частоту  , то ток обусловлен ЭДС
, то ток обусловлен ЭДС  и его частота равна
и его частота равна  . Следовательно ток является током во вращающемся роторе, а ток
. Следовательно ток является током во вращающемся роторе, а ток  в эквивалентном неподвижном.
в эквивалентном неподвижном.
Векторные диаграммы вторичной цепи АД во вращающемся роторе и эквивалентном неподвижном роторе изображены на рисунках 5,6.
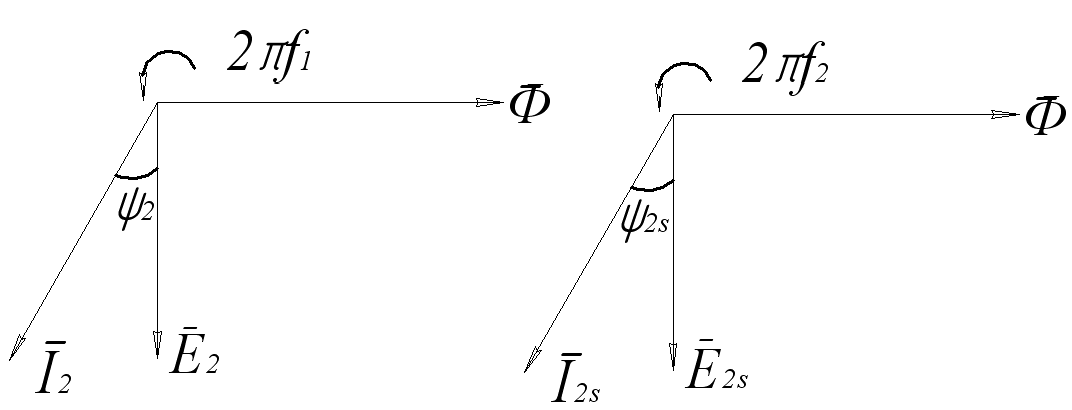
Так как токи  равны по амплитуде и по фазе, то будут равны и одинаково ориентированы в пространстве МДС
равны по амплитуде и по фазе, то будут равны и одинаково ориентированы в пространстве МДС  . МДС
. МДС  перемещается относительно ротора в направлении его движения с угловой скоростью
перемещается относительно ротора в направлении его движения с угловой скоростью
 .
.
Скорость ротора равна:
 .
.
Поэтому  при любых скольжениях S будет перемещаться в пространстве относительно неподвижного статора с угловой скоростью:
при любых скольжениях S будет перемещаться в пространстве относительно неподвижного статора с угловой скоростью:
 .
.
С такой же скоростью перемещается в пространстве МДС  , созданная обмоткой статора при протекании по ней тока
, созданная обмоткой статора при протекании по ней тока  с частотой . Следовательно при любых значениях скольжения МДС
с частотой . Следовательно при любых значениях скольжения МДС  неподвижны относительно друг друга и будут создавать результирующую МДС
неподвижны относительно друг друга и будут создавать результирующую МДС  , равную:
, равную:
 .
.
Отсюда следует, что замена вращающегося ротора эквивалентным неподвижным не нарушает магнитное состояние машины.
Таким образом, для перехода к эквивалентному неподвижному ротору следует у заторможенного ротора активное сопротивление  заменить на
заменить на  , для чего в его цепь вводится добавочное сопротивление
, для чего в его цепь вводится добавочное сопротивление  :
:
 . (7)
. (7)
Асинхронная машина с эквивалентным неподвижным ротором в электрическом отношении подобна трансформатору, работающему на чисто активную нагрузку.
Полная мощность, поглощаемая в эквивалентном неподвижном роторе:
 . (8)
. (8)
Эта мощность передаётся из статора в ротор и называется электромагнитной мощностью. Часть этой мощности затрачивается на покрытие потерь в обмотке ротора:
 , (9)
, (9)
где m – число фаз.
Остальная часть поглощается в сопротивлении  :
:
 . (10)
. (10)
В реальной машине этой мощности соответствует полная механическая мощность, которая получается в результате преобразования электрической энергии в механическую.
Электромагнитный момент, развиваемый машиной:
 . (11)
. (11)
Отношение мощностей  равно:
равно:
 . (12)
. (12)
При  электрические потери
электрические потери  в роторе пропорциональны скольжению.
в роторе пропорциональны скольжению.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет







